1 General
1.1 Introduction
Congratulations on your purchase of the Maretron DSM410 NMEA 2000® 4.1” High Bright Graphic Display. Maretron has designed and built your display to the highest standards for years of dependable and accurate service.
Maretron’s DSM410 is a high-resolution color display that allows easy interpretation of NMEA 2000® instrument and navigation data through custom display configurations, with an easy-to-use five-key illuminated keypad.
The Maretron DSM410 is designed to operate within the harsh demands of the marine environment. However, no piece of marine electronic equipment can function properly unless installed, configured, and maintained in the correct manner. Please read carefully and follow these instructions for installation, configuration, and usage of the Maretron DSM410 in order to ensure optimal performance.
1.2 Firmware Revision
This manual corresponds to DSM410 firmware revision 1.7.2.
1.3 DSM410 Features
The Maretron DSM410 has the following features.
· NMEA 2000® Interface
· Waterproof NMEA 2000® Connector
· Sealed Waterproof Enclosure
· Powered Directly from NMEA 2000® Network
· Flush Mounting
· Backlit Capacitive Touch Keys
· Visual and Audible Alarms
· 16 User Configurable Favorite Screens (Automatic or Manual Scrolling between Screens)
· Capable of Viewing Virtually all NMEA 2000® Information including Batteries, Engines, Generators, Shore Power, Tanks, Navigation, Weather and More
1.4 Quick Install
Installing the Maretron DSM410 display involves the following four steps. Please refer to the individual sections for additional details.
· Unpack the Box (Section 2.1)
· Choose a Mounting Location (Section 2.2)
· Mount the DSM410 (Section 2.3)
· Connect the DSM410 (Section 2.4)
2 Installation
2.1 Unpacking the Box
When unpacking the box containing the Maretron DSM410, you should find the following items:
· 1 – DSM410 NMEA 2000® Multi-function Graphic Display
· 1 – DSM410 Bezel
· 4 – Mounting Screws
· 1 – DSM410 User’s Manual USB Flash Drive
· 1 – Warranty Registration Card
If any of these items are missing or damaged, please contact Maretron.
2.2 Choosing a Mounting Location
The DSM410 is housed in a waterproof enclosure (IEC IP67 rating – protected against the effects of temporary immersion in water) and can be mounted in either an outdoor location or an indoor location.
2.3 Mounting the DSM410
The DSM410 can be flush mounted. Maretron suggests a location at which the display can be viewed from a relatively straight angle, and at which the keys are easily touched.
2.3.1 Flush Mounting the DSM410
The DSM410 can be directly mounted to any suitable surface. You may choose to secure the DSM410 to the mounting surface with the included wood screws or machine screws, or you may use silicone or a similar adhesive if you do not have easy access to the rear side of the mounting surface. The steps for this type of mounting are as follows:
1. Attach the Mounting Template (see Section 13) to the surface where the DSM410 is to be located.
a. Make sure the template is level by using one of the horizontal lines as a guide.
b. Scotch tape works well for securing the template.
2. If securing with machine screws, drill the four mounting holes all the way through the mounting surface at the locations indicated on the Mounting Template.
a. Use a 4.3mm or 0.17” drill bit.
3. Cut a hole for the body of the display.
4. Remove the template from the mounting surface.
5. Place the DSM410 on the mounting surface, with the body of the DSM410 inserted into the large hole. If mounting with silicone adhesive, apply the adhesive to the portion of the DSM410 that will come into contact with the mounting surface once installed.
6. If mounting with machine screws, insert the screws into the front of the DSM410 and tighten to nuts on the back side of the mounting surface.
a. Use M3 machine screws.
b. Don’t over tighten the screws.
7. Snap the bezel over the DSM410. Please pay attention to the orientation of the bezel. The top and bottom edges of the bezel and the DSM410 have one snap fitting, while the left and right edges have two snap fittings.
2.4 Connecting the DSM410
The Maretron DSM410 provides a connection to an NMEA 2000® interface through a standard Micro NMEA 2000® connector that can be found on the back of the unit. The NMEA 2000® connector is a five-pin male connector (see Figure 1). You connect the DSM410 to an NMEA 2000® network using a Maretron NMEA 2000® cable (or compatible cable) by connecting the female end of the NMEA 2000® network cable to the male connector on the DSM410 (note the key on the male connector and keyway on the female connector). Be sure the cable is connected securely and that the collar on the cable connector is tightened firmly. Connect the other end of the cable (male) to the NMEA 2000® network in the same manner. The DSM410 is designed such that you can plug or unplug it from an NMEA 2000® network while the power to the network is connected or disconnected. Please follow recommended practices for installing NMEA 2000® network products.
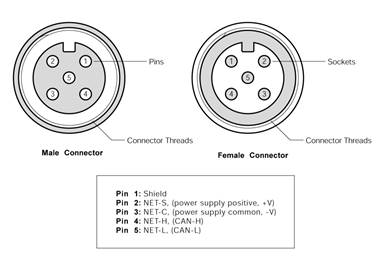
Figure 1 – NMEA 2000® Connector Face View
2.4.1 Checking the Connection
Once the NMEA 2000® connection to the Maretron DSM410 has been completed, observe the display to check to see that information is being properly received. One way to verify connectivity is to enter the device selection menu, which is described in Section 5.2.3.2. Refer to Section 10, “Troubleshooting”, if no information appears.
3 Operating the DSM410
3.1 Turning the DSM410 On
To turn on the DSM410, press the power key (the leftmost of
the five keys on the keypad). The DSM410 will display a warning and ask you to
press the Accept key (![]() ) to acknowledge the warning and
continue operation of the DSM410 (see Figure 2 below).
) to acknowledge the warning and
continue operation of the DSM410 (see Figure 2 below).

Figure 2 – DSM410 Power Up Screen
Alternatively, you may power down the DSM410 by pressing and holding the power key (see Section 3.2 below for details).
3.2 Turning the DSM410 Off
To turn the DSM410 off, press and hold the power key. The DSM410 will display a countdown screen, which can be seen in Figure 3. If you continue to hold the power key, the DSM410 will power down in approximately three seconds. If you release the power key before these three seconds have elapsed, the DSM410 will return to its current operational state.
Figure 3 – Powerdown Countdown Screen
3.3 Keypad Essentials
The DSM410 has a five-key keypad located below the screen. Each key has slightly different functions depending on the operating mode. Figure 4 below shows the DSM410 keys and their names.

Figure 4 – Keypad and Key Names
In the normal viewing mode where your favorite screens are displayed, the keys on the DSM250 keypad have the following functions:
Power Key (![]() ) – turns the DSM250 off (see
section 3.1 on page 4 for details). A momentary press of this key can also be
used to accept or cancel an Alert (see section 8.2.1 on page 234
for details).
) – turns the DSM250 off (see
section 3.1 on page 4 for details). A momentary press of this key can also be
used to accept or cancel an Alert (see section 8.2.1 on page 234
for details).
Lights Key (![]() ) – a quick press cycles the
backlight brightness between three programmed brightness levels (see Section 5.2.4.3 on page 32 for details), while a long press cycles the DSM250 through 8
programmable color palettes (see Section 5.2.4.4 on Page 32).
) – a quick press cycles the
backlight brightness between three programmed brightness levels (see Section 5.2.4.3 on page 32 for details), while a long press cycles the DSM250 through 8
programmable color palettes (see Section 5.2.4.4 on Page 32).
Up Key (![]() ) – switches the display from
the current favorite screen to the next highest numbered favorite screen that
is enabled for that particular mode.
) – switches the display from
the current favorite screen to the next highest numbered favorite screen that
is enabled for that particular mode.
Down Key (![]() ) – switches the display from
the current favorites screen to the next lowest numbered favorite screen that
is enabled for that particular mode
) – switches the display from
the current favorites screen to the next lowest numbered favorite screen that
is enabled for that particular mode
Enter Key (![]() ) – changes from favorite
screens mode to menu mode
) – changes from favorite
screens mode to menu mode
In menu mode, a legend appears along the bottom of the screen displaying the function of each of the keys. The functions differ slightly depending on whether a menu is being accessed, a selection is being made from a list of possible data values, or a numeric value is being increased or decreased.
3.3.1 Navigating in a Menu
When accessing a menu, the keys on the DSM410 keypad have the following functions:
Power Key (![]() ) – turns the DSM410
off (see Section 3.1 on page 4 for details).
) – turns the DSM410
off (see Section 3.1 on page 4 for details).
Back Key (![]() ) – returns to the next
higher-level menu. If already at the top-level menu, exits menu mode returns to
favorite screens mode. Menu levels are indicated with indentation of the text
within the menus.
) – returns to the next
higher-level menu. If already at the top-level menu, exits menu mode returns to
favorite screens mode. Menu levels are indicated with indentation of the text
within the menus.
Scroll Up Key (![]() ) – changes the currently
selected (or highlighted) menu item from the presently selected one to the one immediately
above it. If the top menu item is already selected, the selection wraps to the
bottom menu item.
) – changes the currently
selected (or highlighted) menu item from the presently selected one to the one immediately
above it. If the top menu item is already selected, the selection wraps to the
bottom menu item.
Scroll Down Key (![]() ) – changes the currently
selected (or highlighted) menu item from the presently selected one to the one
immediately below it. If the bottom menu item is already selected, the
selection wraps to the top menu item.
) – changes the currently
selected (or highlighted) menu item from the presently selected one to the one
immediately below it. If the bottom menu item is already selected, the
selection wraps to the top menu item.
Enter Key (![]() ) – if the currently selected
menu item has a submenu, opens that submenu. If the currently selected menu
item has an editable value (indicated by a colon (:) followed by the data
value, moves the selection to the editable value and changes the keys to edit
mode.
) – if the currently selected
menu item has a submenu, opens that submenu. If the currently selected menu
item has an editable value (indicated by a colon (:) followed by the data
value, moves the selection to the editable value and changes the keys to edit
mode.
3.3.2 Choosing a Value from a List
When editing a value chosen from a list, the keys on the DSM410 keypad have the following functions:
Power Key (![]() ) – turns the DSM410
off (see Section 3.1 on page 4 for details).
) – turns the DSM410
off (see Section 3.1 on page 4 for details).
Back Key (![]() ) – aborts the edit and restores
the editable value to its previous value
) – aborts the edit and restores
the editable value to its previous value
Scroll Up Key (![]() ) – changes the currently
selected editable value from the presently selected one to the one immediately
above it in the list of possibilities. If the top menu item is already
selected, the selection wraps to the bottom menu item.
) – changes the currently
selected editable value from the presently selected one to the one immediately
above it in the list of possibilities. If the top menu item is already
selected, the selection wraps to the bottom menu item.
Scroll Down Key (![]() ) – changes the
currently selected editable value from the presently selected one to the one
immediately below it in the list of possibilities. If the bottom menu item is
already selected, the selection wraps to the top menu item.
) – changes the
currently selected editable value from the presently selected one to the one
immediately below it in the list of possibilities. If the bottom menu item is
already selected, the selection wraps to the top menu item.
Enter Key (![]() ) – Accepts the currently
displayed value and stores it.
) – Accepts the currently
displayed value and stores it.
3.3.3 Entering a Numeric Value
When editing a numeric value, the keys on the DSM410 keypad have the following functions:
Power Key (![]() ) – turns the DSM410
off (see Section 3.1 on page 4 for details).
) – turns the DSM410
off (see Section 3.1 on page 4 for details).
Cancel Key (![]() ) – aborts the edit and restores
the editable value to its previous value
) – aborts the edit and restores
the editable value to its previous value
Increase Key (![]() ) – increases the editable value
) – increases the editable value
Decrease Key (![]() ) – decreases the editable value
) – decreases the editable value
Accept Key (![]() ) – Accepts the currently
displayed value and stores it.
) – Accepts the currently
displayed value and stores it.
3.3.4 Entering a Textual Value
When entering a text string, the following menu will be presented:
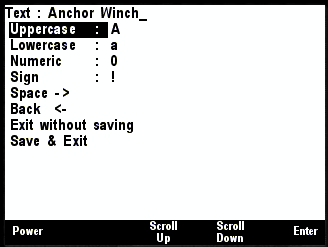
Figure 5 – Entering a Textual Value
The top line contains the textual string that has already been entered. New characters are appended one at a time to the end of the line, at the position marked by the underscore.
To append an uppercase character, use the Scroll Up and Scroll Down buttons to select Uppercase and then press Enter to go across to the characters. Now use the Scroll Up and Scroll Down buttons again to select the required character, and press Enter to transfer the character to the cursor position. If another uppercase character is required, repeat this last step, or press the Back button top return to the choices on the left.
To append a lowercase character, use the Scroll Up and Scroll Down buttons to select Lowercase and then press Enter to go across to the characters. Now use the Scroll Up and Scroll Down buttons again to select the required character, and press Enter to transfer the character to the cursor position. If another lowercase character is required, repeat this last step, or press the Back button top return to the choices on the left.
To append a numeral, use the Scroll Up and Scroll Down buttons to select Numeric and then press Enter to go across to the numbers. Now use the Scroll Up and Scroll Down buttons again to select the required numeral, and press Enter to transfer the numeral to the cursor position. If another numeral is required, repeat this last step, or press the Back button top return to the choices on the left.
To append a punctuation character or other symbol, use the Scroll Up and Scroll Down buttons to select Sign and then press Enter to go across to the sign characters. Now use the Scroll Up and Scroll Down buttons again to select the required character, and press Enter to transfer the character to the cursor position. If another sign character is required, repeat this last step, or press the Back button top return to the choices on the left.
To append a space, use the Scroll Up and Scroll Down buttons to select Space and then press Enter.
To delete the character immediately preceding the underscore, use the Scroll Up and Scroll Down buttons to select Back and then press Enter. Note that it is not possible to delete the entire text string; use the Back function repeatedly to delete the characters one at a time.
To abort the entire textual edit, and return to the original field without changing the contents of the field, use the Scroll Up and Scroll Down buttons to select Exit without Saving and then press Enter.
To enter the text string in the original field, use the Scroll Up and Scroll Down buttons to select Save and Exit and then press Enter.
3.4 Settings Lock Mode
Sometimes, it is desirable to lock the settings of the DSM410 in order to keep them from being inadvertently changed. The DSM410 has a settings lock mode in which the settings of the DSM410 cannot be changed. To enter the lock mode, do the following steps:
1. Begin with the DSM410 powered off.
2. Press and hold the Up and Enter buttons.
3. While you are holding these two buttons, press and release the Power button.
4. Once the DSM410 has powered on and is displaying the warning screen, you may release the two buttons you are holding.
5. The DSM410 is now in settings lock mode. You can verify this by pressing the Enter key to display the main menu. You should see only the “Alert Status” and “Favorite Screens Mode” menu entries.
6. To exit settings lock mode, repeat steps 1-4. When you enter the main menu, you should again see all menu entries appear.
4 Important Concepts
4.1 Favorite Screens
The DSM410 can display many different types of information in many different configurations. It is capable of displaying up to four distinct windows on its screen at one time. Rather than making you select from among the many types of available information any time you want to change the displayed data, the DSM410 has the concept of “Favorite Screens”. A “Favorite Screen” is a combination of display settings, data to display, and formats in which to display the data. The DSM410 supports up to 16 different favorite screens.
4.2 Categories and Data Types
The DSM410 is capable of displaying many types of information. In order to make it easier to locate a specific type of information to display, the different types of information are organized into general categories:
· AC Bus
· AC Generator
· AC Utility
· Anchor Watch
· DC
· Depth
· Electrical
· Elec. Distribution
· Engine
· Environment
· Fluid Flow
· Fuel Management
· GPS
· Heading
· Humidity
· Indicator
· Mechanical
· Motion
· Navigation
· Pressure/Vacuum
· Rudder
· SMS (Text) Status
· Special Device
· Speed
· Tank
· Temperature
· Time/Date
· Transmission
· VDR
· Vessel
· Wind
The following sections explore each category in detail and spell out all of the data types that are available for display, if the appropriate sensors are installed in the network.
4.2.1 AC Bus
Average Frequency – displays average frequency of the AC power on the bus
Average L-N Voltage – displays average line to neutral RMS voltage of the AC power on the bus
Average L-L Voltage – displays average line to line RMS voltage of the AC power on the bus
Phase A Frequency – displays frequency of the AC power on phase A of the Bus
Phase A L-N Voltage – displays phase A Line-to-Neutral RMS voltage of the AC Bus
Phase AB L-L Voltage – displays phase A Line-to-phase B Line RMS voltage of the AC Bus
Phase B Frequency – displays frequency of the AC power on phase B of the bus
Phase B L-N Voltage – displays phase B Line-to-Neutral RMS voltage of the AC Bus
Phase BC L-L Voltage – displays phase B Line-to-phase C Line RMS voltage of the AC Bus
Phase C Frequency – displays frequency of the AC power on phase C of the bus
Phase C L-N Voltage – displays phase C Line-to-Neutral RMS voltage of the AC Bus
Phase CA L-L Voltage – displays phase C Line-to-phase A Line RMS voltage of the AC Bus
4.2.2 AC Generator
Average Current – displays the average current of the AC power on the generator
Average Frequency – displays the average frequency of the AC power on the generator
Average L-N Voltage – displays average line to neutral RMS voltage of the AC power on the generator
Average L-L Voltage – displays average line to line RMS voltage of the AC power on the generator
Total Real Power – displays real power output by the generator
Total Reactive Power – displays reactive power output by the generator
Total Apparent Power – displays apparent power output by the generator
Total Power Factor – displays power factor of the generator
Total kWH Export – displays total energy produced by the generator (for the Maretron ACM100, this parameter’s value may be reset to zero with the control mode of the display – see Section 5.2.7.14 for details)
Total kWH Import – displays total energy consumed by the generator (for the Maretron ACM100, this parameter’s value may be reset to zero with the control mode of the display – see Section 5.2.7.14 for details)
Phase A Current – displays phase A current of the Generator
Phase A Frequency – displays frequency of the AC power on phase A of the Generator
Phase A L-N Voltage – displays phase A Line-to-Neutral RMS voltage of the Generator
Phase AB L-L Voltage – displays phase A Line-to-phase B Line RMS voltage of the Generator
Phase A Real Power – displays real power output on phase A of the generator
Phase A Reactive Power – displays reactive power output on phase A of the Generator
Phase A Apparent Power – displays apparent power output on phase A of the Generator
Phase A Power Factor – displays power factor of phase A of the Generator
Phase B Current – displays phase B current of the Generator
Phase B Frequency – displays frequency of the AC power on phase B of the Generator
Phase B L-N Voltage – displays phase B Line-to-Neutral RMS voltage of the Generator
Phase BC L-L Voltage – displays phase B Line-to-phase C Line RMS voltage of the Generator
Phase B Real Power – displays real power output on phase B of the generator
Phase B Reactive Power – displays reactive power output on phase B of the Generator
Phase B Apparent Power – displays apparent power output on phase B of the Generator
Phase B Power Factor – displays power factor of phase B of the Generator
Phase C Current – displays phase C current of the Generator
Phase C Frequency – displays frequency of the AC power on phase C of the Generator
Phase C L-N Voltage – displays phase C Line-to-Neutral RMS voltage of the Generator
Phase CA L-L Voltage – displays phase C Line-to-phase A Line RMS voltage of the Generator
Phase C Real Power – displays real power output on phase C of the generator
Phase C Reactive Power – displays reactive power output on phase C of the Generator
Phase C Apparent Power – displays apparent power output on phase C of the Generator
Phase C Power Factor – displays power factor of phase C of the Generator
4.2.3 AC Utility
Average Current – displays average current of the AC power on the utility
Average Frequency – displays average frequency of the AC power on the utility
Average L-N Voltage – displays average line to neutral RMS voltage of the AC power on the utility
Average L-L Voltage – displays average line to line RMS voltage of the AC power on the utility
Total Real Power – displays real power output by the utility
Total Reactive Power – displays reactive power output by the utility
Total Apparent Power – displays apparent power output by the utility
Total Power Factor – displays power factor of the utility
Total kWH Export – displays total energy produced by the utility (for the Maretron ACM100, this parameter’s value may be reset to zero with the control mode of the display – see Section 5.2.7.14 for details)
Total kWH Import – displays total energy consumed by the utility (for the Maretron ACM100, this parameter’s value may be reset to zero with the control mode of the display – see Section 5.2.7.14 for details)
Phase A Current – displays phase A current of the Utility
Phase A Frequency – displays frequency of the AC power on phase A of the Utility
Phase A L-N Voltage – displays phase A Line-to-Neutral RMS voltage of the Utility
Phase AB L-L Voltage – displays phase A Line-to-phase B Line RMS voltage of the Utility
Phase A Real Power – displays real power output on phase A of the Utility
Phase A Reactive Power – displays reactive power output on phase A of the Utility
Phase A Apparent Power – displays apparent power output on phase A of the Utility
Phase A Power Factor – displays power factor of phase A of the Utility
Phase B Current – displays phase B current of the Utility
Phase B Frequency – displays frequency of the AC power on phase B of the utility
Phase B L-N Voltage – displays phase B Line-to-Neutral RMS voltage of the Utility
Phase BC L-L Voltage – displays phase B Line-to-phase C Line RMS voltage of the Utility
Phase B Real Power – displays real power output on phase B of the Utility
Phase B Reactive Power – displays reactive power output on phase B of the Utility
Phase B Apparent Power – displays apparent power output on phase B of the Utility
Phase B Power Factor – displays power factor of phase B of the Utility
Phase C Current – displays phase C current of the Utility
Phase C Frequency – displays frequency of the AC power on phase C of the utility
Phase C L-N Voltage – displays phase C Line-to-Neutral RMS voltage of the Utility
Phase CA L-L Voltage – displays phase C Line-to-phase A Line RMS voltage of the Utility
Phase C Real Power – displays real power output on phase C of the Utility
Phase C Reactive Power – displays reactive power output on phase C of the Utility
Phase C Apparent Power – displays apparent power output on phase C of the Utility
Phase C Power Factor – displays power factor of phase C of the Utility
4.2.4 Anchor Watch
The DSM410 provides a graphical display of the Anchor Alert (section 8.3.7.9) parameters. When the vessel is anchored, the position of vessel at the point of dropping the anchor is entered in to the Anchor Alert plus the maximum distance that the boat can drift from that position (normally a little more than the amount of Anchor Chain that you have let out). If the boat moves beyond that radius, an Alert is triggered. The Anchor Watch display shows the last reported position of the vessel relative to the reported Anchor Drop position and the radius of the alert (see section 7.1 for more details on the display).
You may use the control mode of the display to easily set the Anchor Drop position. See Section 7.1 for details.
4.2.5 DC
The DSM410 supports the display of information for up to 64 DC sources including alternators, batteries, solar cells, wind generators, etc., with special parameters for batteries (i.e., State of Charge, Time Remaining, etc.).
Current – displays electrical current being sourced to/from the battery
Voltage – displays voltage measured at the battery
Battery Temperature – displays battery case temperature
Battery State of Charge – displays estimated state of charge of the battery (please consult the battery monitor’s documentation for details)
Battery Time Remaining – displays estimated time remaining for the battery given its current temperature and rate of discharge (please consult the battery monitor’s documentation for details)
Ripple Voltage – displays magnitude of the AC component riding on top of the DC voltage
Power – displays the power produced or consumed by the battery
4.2.6 Depth
Transducer Offset – when negative, it displays distance from the depth transducer to the bottom of the keel, when positive it displays distance between the depth transducer and the waterline
Water Depth – displays the current water depth including the transducer offset. If the transducer offset is programmed to a negative number, then the water depth represents the depth below the keel. If the transducer offset is positive, then the water depth represents water line depth.
Water Below Transducer – displays the distance from the depth transducer to the sea or lake bottom (the transducer offset is not taken into account)
4.2.7 Electrical
Resistance – displays electrical resistance
4.2.8 Elec. Distribution
The DSM410 supports control of the DCR100, Carling OctoPlex AC and DC Boxes, and other electrical distribution devices that utilize NMEA Command of the 127501 Binary Switch Status message for controlling loads.
Switch/Breaker – controls the ON/OFF state of a switch or circuit breaker
Breaker Current – displays current through a switch or circuit breaker
Hardware OFF Counter – displays the value of a hardware counter in Maretron’s DCR100, SIM100 and RIM100 that count the number of the times the indicator has transitioned to the OFF state. This counter may be reset with the control mode of the display – see Section 5.2.7.14 for details)
Hardware ON Counter – displays the value of a hardware counter in Maretron’s DCR100, SIM100 and RIM100 that count the number of the times the indicator has transitioned to the ON state. This counter may be reset with the control mode of the display – see Section 5.2.7.14 for details)
Hardware ERROR Counter – displays the value of a hardware counter in Maretron’s DCR100, SIM100 and RIM100 that count the number of the times the indicator has transitioned to the ERROR state. This counter may be reset with the control mode of the display – see Section 5.2.7.14 for details)
Hardware OFF Timer – displays the value of a hardware timer in Maretron’s DCR100, SIM100 and RIM100 that accumulates the elapsed time that the indicator has spent in the OFF state. This timer may be reset with the control mode of the display – see Section 5.2.7.14 for details)
Hardware ON Timer – displays the value of a hardware timer in Maretron’s DCR100, SIM100 and RIM100 that accumulates the elapsed time that the indicator has spent in the ON state. This timer may be reset with the control mode of the display – see Section 5.2.7.14 for details)
Hardware ERROR Timer – displays the value of a hardware timer in Maretron’s DCR100, SIM100 and RIM100 that accumulates the elapsed time that the indicator has spent in the ERROR state. This timer may be reset with the control mode of the display – see Section 5.2.7.14 for details)
4.2.9 Engine
The DSM410 supports the display of information for up to 64 engines.
Boost Pressure – displays the boost pressure of a supercharger or turbocharger
Hours – displays the number of hours of operation reported by the engine
Coolant Pressure – displays the engine’s coolant pressure
Coolant Temp. – displays the engine’s coolant temperature
Exhaust Gas Temp. – displays the temperature of the engine’s exhaust gas
Fuel Pressure – displays the pressure of the fuel for the engine
Fuel Rate – displays the rate of fuel consumption for the engine
Oil Pressure – displays the engine’s oil pressure
Oil Temp. – displays the engine’s oil temperature
Tachometer – displays the rotational speed of the engine
Tilt/Trim – displays the tilt or trim of the drive
Voltage – displays the electrical power supply voltage measured at the engine
Fuel Economy (Dis./Vol.) – displays the current fuel economy for the engine
Fuel Consumption (Vol./Dis.) – displays the current fuel consumption for the engine
Percent Load – displays the current load on the engine as a percentage of rated load
Percent Torque – displays the current torque from the engine as a percentage of rated torque
Trip Fuel Used – displays the total amount of fuel consumed by that engine on the present trip (fuel flow transducers that are capable of being reset via the 126208 NMEA 2000® command of the Trip Fuel Used field of the 127497 Trip Parameters, Engine message, such as the Maretron FFM100, may be reset with the control mode of the display – see Section 5.2.7.14 for details)
Warning – displays warning conditions generated by the engine
4.2.10 Environment
Barometric – displays the current atmospheric (barometric) pressure
Heat Index – displays the current heat index based on air temperature and humidity
Humidity Inside – displays the relative humidity from an indoor humidity sensor
Humidity Outside – displays the relative humidity for an outdoor humidity sensor
Moon Phase – displays the phase of the moon at the current time and position
Sunrise – displays the local time of sunrise for the current day and position
Sunset – displays the local time of sunset for the current day and position
Dew Point – displays the current dew point based on air temperature and humidity
Temp Engine Room – displays the air temperature from a sensor mounted in an engine room
Temp Inside – displays the air temperature from a sensor mounted inside the vessel
Temp Main Cabin – displays the air temperature from a sensor mounted inside the main cabin
Temp Outside – displays the air temperature from a sensor mounted outside
Temp Sea – displays the current temperature of the water
Twilight AM – displays the time of nautical twilight before sunrise for the current day and position
Twilight PM – displays the time of nautical twilight after sunset for the current day and position
Weather – displays a screen with a wide variety of weather-related data (See Section 7.14 for details)
Wind Chill – displays the current wind chill based on air temperature and wind speed
4.2.11 Fluid Flow
Flow Rate – displays the current rate of flow of a fluid
Trip Volume – displays the total volume of fluid through the sensor on the present trip (fluid flow transducers that are capable of being reset via the NMEA 2000 command of the Trip Volume field of the 65287 Trip Volume (Maretron Proprietary) message, such as the Maretron FFM100, may be reset with the control mode of the display – see Section 5.2.7.14 for details)
4.2.12 Fuel Management
|
|
WARNING: Maretron fuel management products are designed to be accurate and reliable; however they should be used only as aids for fuel management and not as a replacement for traditional fuel management techniques. BEWARE: Conditions can quickly change that drastically effect time and distance to empty.
You should not use the fuel management data types unless you fully understand all the parameters associated with fuel management. All fuel tanks and all engines must be included when setting up the DSM410 plus there must be accurate fuel rate sensors installed on the vessel and accurate speed information in order for the DSM410 to properly display fuel management information. You should also note that fuel levels may contain significant error if the boat is not sitting level in the water (i.e., sailboat heeled over or a power boat riding bow up won’t necessarily report the correct amount of fuel). Even when setup correctly, the DSM410 should be used only as an aid and not the sole source for fuel management information. |

Total Fuel Economy – displays distance traveled per unit fuel used (for example, miles per gallon or kilometers per liter) using the specified GPS and specified engine instances within the favorite screen setup (see Section 5.2.6.4.2 for details).
Total Fuel Rate – displays rate of fuel usage per unit time (for example, gallons or liters per hour) for all engine instances specified within the favorite screen setup (see Section 5.2.6.4.2 for details)
Total Fuel Remaining – displays total fuel remaining in all fuel tanks specified within the favorite screen setup (see Section 5.2.6.4.2. In order for the DSM410 to properly calculate total fuel remaining, tank monitors connected to the network must provide tank capacity in addition to fluid level.
Distance to Empty – displays the distance you can travel before all fuel is consumed, assuming all conditions remain the same. The DSM410 computes distance to empty using several different parameters including the total fuel remaining (see above) and fuel economy (also discussed above). Remember, conditions can rapidly change that may drastically effect distance to empty. For example, if you are going out to sea with the wind and current behind you, the distance to empty may indicate that there is enough fuel to return home when in fact there isn’t enough fuel to return. Distance to empty is only applicable if the conditions remain the same.
Time to Empty – displays the amount of time you can travel before all fuel is consumed, assuming all conditions remain the same. The DSM410 computes time to empty using total fuel remaining (see above) and the engine(s) fuel rate. Remember, conditions can rapidly change that may drastically effect time to empty. For example, if you are going out to sea with the wind and current behind you, the time to empty may indicate that there is enough fuel to return home when in fact there isn’t enough fuel to return. Time to empty is only applicable if the conditions remain the same.
Total Fuel Capacity – displays the total capacity of all fuel tanks. The DSM410 can only compute total fuel capacity assuming all totalized tanks are transmitting their capacity.
Total Fuel Level – displays the percentage of fuel remaining in all fuel tanks.
Total Fuel Consumption – displays the total volume of fuel used per unit of distance traveled (for example, gallons per mile or liters per km) using the specified GPS and specified engine instances within the favorite screen setup (see Section 5.2.6.4.2 for details).
Total Trip Fuel Used – displays the total volume of fuel used on the current trip from by all engines or fuel flow monitors that support the transmission of trip fuel used information on the network (fuel flow transducers that are capable of being reset via the 126208 NMEA 2000® command of the Trip Fuel Used field of the 127497 Trip Parameters, Engine message, such as the Maretron FFM100, may be reset with the control mode of the display – see Section 5.2.7.14 for details).
4.2.13 GPS
Course Over Ground – displays the current Course over Ground (either true or magnetic depending on the “Heading:” setting found under the “Units…” menu item)
Lat/Lon – displays the current latitude and longitude of the vessel
Speed Over Ground – displays the current speed over ground
Status – displays the current operating mode and status of the specified GPS receiver
4.2.14 Heading
Magnetic/True – displays the current heading of the vessel (the direction the vessel is pointing) relative to true or magnetic north depending on the unit setting of the heading parameter (see Section 5.2.7.1)
Rate of Turn – displays the angular rate of rotation of the vessel about the vertical axis
Variation – displays the magnetic variation used to convert between true and magnetic headings
4.2.15 Humidity
Inside – displays the relative humidity from an indoor humidity sensor
Outside – displays the relative humidity from an outdoor humidity sensor
User Defined 129 – User Defined 144 – displays the relative humidity from humidity sensors of user-defined types
4.2.16 Indicator
Status – displays the on/off status of an indicator
Hardware OFF Counter – displays the value of a hardware counter in Maretron’s DCR100, SIM100 and RIM100 that count the number of the times the indicator has transitioned to the OFF state. This counter may be reset with the control mode of the display – see Section 5.2.7.14 for details)
Hardware ON Counter – displays the value of a hardware counter in Maretron’s DCR100, SIM100 and RIM100 that count the number of the times the indicator has transitioned to the ON state. This counter may be reset with the control mode of the display – see Section 5.2.7.14 for details)
Hardware ERROR Counter – displays the value of a hardware counter in Maretron’s DCR100, SIM100 and RIM100 that count the number of the times the indicator has transitioned to the ERROR state. This counter may be reset with the control mode of the display – see Section 5.2.7.14 for details)
Hardware OFF Timer – displays the value of a hardware timer in Maretron’s DCR100, SIM100 and RIM100 that accumulates the elapsed time that the indicator has spent in the OFF state. This timer may be reset with the control mode of the display – see Section 5.2.7.14 for details)
Hardware ON Timer – displays the value of a hardware timer in Maretron’s DCR100, SIM100 and RIM100 that accumulates the elapsed time that the indicator has spent in the ON state. This timer may be reset with the control mode of the display – see Section 5.2.7.14 for details)
Hardware ERROR Timer – displays the value of a hardware timer in Maretron’s DCR100, SIM100 and RIM100 that accumulates the elapsed time that the indicator has spent in the ERROR state. This timer may be reset with the control mode of the display – see Section 5.2.7.14 for details)
4.2.17 Mechanical
dB – displays a level (sound, power) measured by a sensor that transmits a decibel level
Force – displays mechanical force from a load cell
Strain – displays the amount of mechanical strain an object is subjected to
4.2.18 Motion
Acceleration – displays acceleration
Angle – displays an angle transmitted by an angle sensor (e.g., mast rotation angle)
Angular Velocity – displays angular velocity
Angular Acceleration – displays angular acceleration
Distance – displays a linear distance
Rotational Rate – displays rotational rate (e.g., shaft speed)
Velocity – displays linear velocity
4.2.19 Navigation
The DSM410 is not a primary navigation device; that is, it does not provide means for entering and storing waypoint and route data. The DSM410 can receive information on the current leg of the voyage from a primary navigation device (such as a chart plotter or PC with navigation software and NMEA 2000® interface) and display this information.
Bearing Orig to Dest – displays the direction from the origin waypoint to the destination waypoint
Bearing To Waypoint – displays the bearing to the destination waypoint
Course Over Ground – displays the current Course over Ground (always referenced to true north)
Cross Track Error – displays the cross-track error (minimum distance from the boat to the programmed route)
Distance To Waypoint – displays the distance to the destination waypoint
Est. Time of Arrival – displays the Estimated Time of Arrival at the waypoint
Lat/Lon – displays the current latitude and longitude of the vessel
Rolling Road – displays navigation information for the current leg of the route
Set/Drift – displays the direction (set) and speed (drift) of the water current
Speed Over Ground – displays current Speed over Ground (relative to the earth, not the water)
Time To Go – displays the estimated Time to Go until arrival at the waypoint
VMG to Waypoint – displays the Velocity Made Good; that is, the speed at which the distance to the waypoint is decreasing
Waypoint Number – this displays the number of the destination waypoint
4.2.20 Pressure/Vacuum
Altimeter – displays the current altimeter pressure reading
Barometric – displays the current atmospheric (barometric) pressure
Compressed Air – displays the current pressure of compressed air
Engine Boost – displays the boost pressure of a supercharger or turbocharger
Engine Coolant – displays the coolant pressure for an engine
Engine Fuel – displays the fuel pressure for an engine
Engine Oil – displays the oil pressure for an engine
Filter – displays the current pressure at a fuel filter
Fuel – displays the current fuel pressure
Hydraulic Oil – displays hydraulic oil pressure
Oil – displays the current oil pressure
Steam – displays steam pressure
Transmission Oil – displays oil pressure for an transmission
User Defined 129 – User Defined 144 – displays pressure from a pressure sensor of a user-defined type
Water – displays water pressure
4.2.21 Rudder
The DSM410 supports the display of information for up to four rudders.
Rudder Angle & Order – displays the angle of the vessel’s rudder as indicated by the rudder sensor, as well as the angle to which the rudder has been commanded by an autopilot or steering device
4.2.22 SMS (Text) Status
Status – displays the status of the Maretron SIM100 SMS (Text) device
Signal Strength – displays the signal strength of the cellular network
Indicator – displays whether the Maretron SIM100 SMS (Text) device has a connection to the cellular network
4.2.23 Special Device
Watermaker – displays a screen with several different parameters associated with Sea Recovery watermakers
4.2.24 Speed
Speed Through Water – displays the speed of the boat relative to the water
Speed Over Ground – displays Speed over Ground (relative to the earth, not the water)
Total Log – displays the total distance traveled by the vessel since the log indicator was installed
Trip Log – displays the distance traveled by the vessel since the trip indication of the log indicator was last reset (the trip log value from log transducers that are capable of being reset via the NMEA 2000® command of the Distance Since Last Reset field of the 128275 Distance Log message, such as the Maretron DST110, may be reset with the control mode of the display – see Section 5.2.7.14 for details)
4.2.25 Tank
The DSM410 supports the display of information for up to sixteen tanks types (16 fuel plus 16 water, etc.).
Capacity – displays the fluid capacity of the tank
Level – displays the level of fluid in the tank as a percentage of its capacity
Remaining – displays the amount of fluid in the tank
4.2.26 Temperature
The display supports the display of temperatures. Each temperature sender on the bus is required to state the source of the temperature, which may be one of:
Bait Well
Battery
Dew Point
Engine Coolant
Engine Oil
Engine Room
Exhaust Gas
Freezer
Heat Index
Heating System
Inside
Live Well
Main Cabin
Outside
Refrigeration
Sea
Transmission Oil
User Defined 129 – User Defined 144
Wind Chill
4.2.27 Time/Date
Local Date – displays the current date referenced to the local time offset (see Section 5.2.7.12, on page 43 for details on how to set the local time offset)
UTC Date – displays the current date referenced to Universal Time Coordinated
Moon Phase – displays the phase of the moon at the current time and position
Sunrise – displays the local time of sunrise for the current day and position
Sunset – displays the local time of sunset for the current day and position
Local Time – displays the current time referenced to the local time offset (see Section 5.2.7.12, on page 43 for details on how to set the local time offset)
UTC Time – displays the current time referenced to Universal Time Coordinated (also known as Greenwich Mean Time, or GMT)
Twilight AM – displays the time of nautical twilight (i.e., the time of day when the sun is 12 degrees below the horizon in the morning) for the current day and position
Twilight PM – displays the time of nautical twilight (i.e., the time of day when the sun is 12 degrees below the horizon in the evening) for the current day and position
4.2.28 Transmission
The DSM410 supports the display of information for up to four transmissions.
Gear – displays the current gear of the transmission (forward, neutral, or reverse)
Oil Pressure – displays the pressure of the oil in the transmission
Oil Temp. – displays the temperature of the oil in the transmission
Warning – displays warning indications generated by the transmission
4.2.29 VDR
The DSM410 supports display of status of a Vessel Data Recorder.
Status – displays the operating state of the VDR
Memory Capacity – displays the total memory capacity of the USB flash drive in the VDR
Memory Used – displays the total amount of memory used on the USB flash drive in the VDR
Memory Available – displays the total amount of memory remaining on the USB flash drive in the VDR
Percent Used – displays the percentage of the memory capacity of the USB flash drive in the VDR that is filled with data
Percent Available – displays the percentage of the memory capacity of the USB flash drive in the VDR that is still available for data storage
4.2.30 Vessel
Heave – displays heave (vessel movement along the vertical axis)
Keel – displays the height of a swing keel
Pitch – displays the pitch of the vessel (rotation about the horizontal axis perpendicular to the ship’s keel)
Roll – displays the roll of the vessel (rotation about the horizontal axis parallel to the ship’s keel)
Trim Tabs – displays the position of the vessel’s trim tabs
Trim Tab Port – displays the position of the port trim tab
Trim Tab Starboard – displays the position of the starboard trim tab
4.2.31 Wind
Apparent Direction – displays the angle of the wind relative to the vessel center line as it appears to an observer on the deck of a moving or stationary vessel (does not subtract out the speed of the vessel)
Ground Direction – displays the angle of the wind relative to true or magnetic north (depending on the unit setting of the “heading” parameter, see Section 5.2.7.1) measured relative to a stationary observer, calculated using heading, course over ground (COG), and speed over ground (SOG)
True Direction – displays the angle of the wind relative to the vessel center line (vessel’s speed is subtracted from Apparent wind direction), calculated using speed through water (STW) or speed over ground (SOG) (depending on the unit setting of the “Wind True Vessel Ref.” Parameter, see Section 5.2.7.6)
Apparent Speed – displays the speed of the wind as it appears to an observer on the deck of a moving or stationary vessel (does not subtract out the speed of the vessel)
Ground Speed – displays the speed of the wind relative to a stationary observer, calculated using heading, course over ground (COG), and speed over ground (SOG)
True Speed – displays the speed of the wind as it would appear to an observer if the vessel was stopped in the water, calculated using speed through water (STW) or speed over ground (SOG) (depending on the unit setting of the “Wind True Vessel Ref.” Parameter, see Section 5.2.7.6)
4.3 Alerts
An alert is a signal to a user that there is either an alarm or warning condition requiring user intervention.
Alerts are integrated in an NMEA2000® system. For each Alert, one device acts as a master, or Alert Source, and monitors a parameter against a preset threshold. When the parameter crosses this threshold, the Alert is displayed on the Alert Source and an Alert Message is sent out on the NMEA2000® bus to other devices capable of displaying Alerts. Optionally, an Annunciator message is sent to devices capable of sounding an audio alarm (e.g. the ALM100). Currently, the DSM150, DSM250, DSM410, and the N2KView™ Vessel Monitoring Software are capable of generating and receiving Alert Messages.
The Alert may be accepted or cancelled from any capable device, in which case an Alert Response Message is sent to the Alert Source, which in turn will turn the Annunciators off and inform the devices on the bus of the new Alert Status.
The DSM410 can support the definition of up to 40 alerts.
4.3.1 Alert Types
There are two classes of alerts, which are distinguished by their severity:
· Alarm – An alarm is a type of alert announcing a condition requiring immediate attention or user intervention. Alarms are shown in red (when Active), and always appear above the warnings on the Alert Status Screen.
· Warning – A warning is a type of alert announcing a condition requiring non-immediate attention for precautionary reasons. Warnings are shown in yellow (when Active), and always appear below alarms on the Alert Status Screen.
4.3.2 Alert Terminology
The following alert terminology, consistent with International Maritime Organization Code on Alarms and Indicators, is used in N2KView™ and the DSM410.
· Accept – The user action of acknowledging the existence of an alert. Alerts are only accepted when they are Active
· Cancel – The user action of removing an alert from the list of displayed alerts. Alerts may only be cancelled if the condition causing the alert has been removed.
· Clear – An alert is cleared when the condition causing the alert is removed. This is not a user action.
· Trigger – An alert is triggered when the condition monitored by the alert is met.
4.3.3 Alert Priority
Each alert has a priority which you can define, ranging from 0 to 4000 with 0 the highest or most important priority and 4000 the lowest or least important priority. Alarms always have a higher priority than Warnings (i.e. an Alarm with a priority of 4000 has a higher priority than a warning with priority 0).
4.3.4 Vessel Alert Operating Modes
You can configure alerts to operate in one or more fixed operating modes, 1) disabled, 2) moored, 3) underway, or 4) anchored. This allows you to easily enable or disable groups of individual alarms depending on the vessel’s operating mode. Setting the vessel alert operating mode is described in section 8.6.
The Operating Mode is one of:
· Disabled – All alerts are disabled. This mode should be used when the vessel is in storage, dry-dock, or otherwise out of operation.
· Moored – This mode is used when the vessel is secured to a structure that is permanently attached to the ground like a pier, wharf, dock, or mooring buoy.
· Underway – This mode is used when the vessel is not moored nor anchored.
· Anchored – This mode is used when the vessel is secured to the sea floor with an anchor.
|
NOTE
The DSM410 will always display global alerts generated by other devices on the network, regardless of the Operating Mode selected. |

4.3.5 Alert States
Alerts exist in one of five states.
· Disabled – A Disabled Alert is an alarm or warning that has yet to be enabled or activated. In this state, no action will be taken regardless of the value of the monitored parameter. A Disabled Alert May be enabled in which case it transitions to the Inactive state
· Inactive – An Inactive alert is an alarm or warning that has been enabled, but the condition causing the alert is not present. If the alert condition becomes true, the alert will become an Active Alert. An Inactive alert may be disabled, which causes it to transition to the Disabled state. New alerts are created in the Inactive State.
· Active – An Active alert is an alarm or warning where the condition to trigger the alert has been met, and is still present and the operator has not accepted the alert. An active alert is indicated by a flashing indicator on the Alert Status Screen, and by a flashing colored box at the top right of the DSM410 screen. This box will be visible on all screens. Also, annunciators that are programmed to sound when this alert is active will be sounding during this state. An active alert can be accepted by the user (causing it to become an Accepted Alert) or disabled by the user (causing it to become a Disabled Alert). If the condition causing the alert is rectified, the alert transitions to the Awaiting Cancel state.
· Accepted – An Accepted alert is an alarm or warning which was Active and has been accepted by the user. A solid indicator on the Alert Status Screen indicates an Accepted alert; annunciators are silenced. Normally, an alert is a serious matter that requires immediate attention and requires a deliberate attempt to remove the condition that caused the alert. Sometimes it isn’t practical to immediately remove the condition that caused the alert; accepting the alert will silence the annunciators while the appropriate user action is being taken.
To prevent an alert that has accepted by the user from being forgotten, an accepted alert will transition back to being Active after a period of time set by the user. If the condition causing the alert is rectified (cleared), the alert will transition to the Inactive state.
You may disable the alert at this time, causing it to become a Disabled Alert.
4.3.6 Available Alert Classes
The DSM410 has several classes of alerts, depending on the parameter for which an alert is being configured.
· Low Alert – The alert will become active if the monitored value drops below the value in this alert for longer than the time specified in the Set Delay field.
· High Alert – The alert will become active if the monitored value rises above the value specified in this alert for longer than the time specified in the Set Delay field.
· Data Unavailable Alert – The alert will become active if the monitored value is not received, or is received but with a value of “Data Not Available”, for longer than the time specified in the Set Delay field.
· On Alert – The alert will become active if the monitored switch or flag becomes “ON” for longer than the time specified in the Set Delay field.
· Off Alert – The alert will become active if the monitored switch or flag becomes “OFF” for longer than the time specified in the Set Delay field.
· Tripped Alert – The alert will become active if the monitored circuit breaker becomes “Tripped” for longer than the time specified in the Set Delay field.
· Course Alert – The alert will become active if the monitored course differs from the Reference Direction by more than the Offset COG Set Point for longer than the time specified in the Set Delay field.
· GPS Quality Alert – The alert will become active if the GPS Quality drops below the level set in the GPS Quality Alert Set field for longer than the time specified in the Set Delay field.
· Outside Radius Alert – The alert will become active if the distance between the current GPS position and the Reference Latitude and Longitude rises above the value in the Outside Radius Alert Set field for longer than the time specified in the Set Delay field.
· Inside Radius Alert – The alert will become active if the distance between the current GPS position and the Reference Latitude and Longitude falls below the value in the Outside Radius Alert Set field for longer than the time specified in the Set Delay field.
· Anchor Alert – Similar to the Outside Radius Alert, this alert will become active if the distance between the current GPS position and the Reference Latitude and Longitude rises above the value in the Outside Radius Alert Set field for longer than the time specified in the Set Delay field. The Anchor Alert is more suited for smaller radii, and can be displayed graphically in the Anchor Watch Display.
· Direction Alert – The alert will become active if the monitored course differs from the Reference Direction by more than the Offset Wind Direction Set Point for longer than the time specified in the Set Delay field.
· Timer Alert – The alert will become active when the time reaches the time specified in the Alarm Time field, and thereafter after the intervals specified in the Repeat Interval field.
5 Operating Modes
The DSM410 has two main operating modes including normal viewing of information in the favorite screens mode (Section 5.1) and the menu mode (Section 5.2). Also, the control mode is a sub mode of the favorite screens mode, in which certain control and reset functions may be performed (Section 5.2.7.14).
5.1 Favorite screens modes
After the power up screen (see Section 3.1), the DSM410 always enters the favorite screens mode. In the favorite screens modes, the DSM410 displays one of up to sixteen “favorite” screens. Each “favorite” screen can display one, two, three, or four information displays. Each information display can show any displayable data in any display type supported by that data. In favorite screens mode, the DSM410 can operate in one of two ways:
Manual mode – a particular “favorite” screen remains on the display until you select another one, or
Auto mode – the DSM410 automatically cycles between “favorite” screens, at time intervals which are individually programmable for each “favorite” screen.
An example screen of the DSM410 running in favorite screens mode can be seen in Figure 6 below.
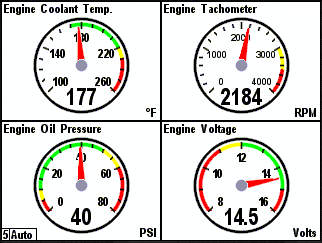
Figure 6 – DSM410 Running in Favorite Screens Mode
The very bottom left hand corner of the screen shows two important parameters: 1) it indicates which favorite screen is being displayed (in this case Favorite #5), and 2) it indicates that the DSM410 is currently operating in the Auto mode. Manual would appear in place of Auto if the DSM410 was operating in Manual mode.
5.2 Menu Mode
The menu mode is entered while viewing favorite screens by
pressing the Enter key (![]() ).
).
In menu mode, the DSM410 may be configured by scrolling up and down the menu and selecting one of the submenus found there. The DSM410 Main Menu can be seen in Figure 7 below.
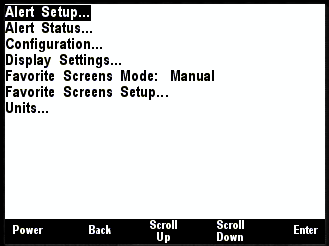
Figure 7 – Main Menu
The menu has the following structure
Alert Setup… (5.2.1)
Add New Alert… (8.2)
Delete Alert… (8.4)
Edit Alert… 8.5)
Operating Mode (8.6)
SMS (Text) Phone Book… (0)
Advanced Configuration… (8.8)
Restore Factory Defaults (8.9)
Alert Status… (5.2.2)
Configuration…
Device Configuration… (5.2.3.1)
Device Selection… (5.2.3.2)
Display Settings…
Advanced Configuration… (5.2.4.1)
Advanced Information… (5.2.4.2)
Backlight… (5.2.4.3)
Color Setup… (5.2.4.4)
Demo Mode (5.2.4.5)
Keypad Beep (5.2.4.6)
Label (5.2.4.7)
Language (5.2.4.8)
Software Version (5.2.4.9)
Favorite Screens Mode (5.2.4.7)
Favorite Screens Setup… (5.2.6)
Units… (5.2.6.4.2)
5.2.1 Alert Setup Menu
Selecting Alert Setup… from the Main Menu allows you to create, delete, and edit the Alerts stored in the DSM410, and to change the operating mode of the vessel. See section 7.25 for details on the Alerts.
5.2.2 Alert Status
Selecting Alert Status… from the Main Menu will display a list of currently active Alerts in the DSM410. See section 8.1.1 for details on the Alert Status Screen.
5.2.3 Configuration Menu
The configuration menu allows you to change the configuration of certain types of Maretron NMEA 2000® devices, as well as to select from which NMEA 2000® nodes data may be received.
The available options within the Configuration screen are shown in Figure 8.
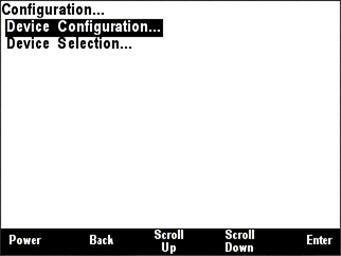
Figure 8 – Configuration Screen
5.2.3.1 Device Configuration
The ability to calibrate and configure other devices on the bus is a major portion of this manual. For this reason it has been given an entire section. See section 6 for details.
5.2.3.2 Device Selection
The “Device Selection…” menu allows you to enable and disable the display of data from individual NMEA 2000® devices. In this manner, multiple devices of the same type may be used in redundant and fail-safe configurations. A typical “Device Selection…” menu for a network configuration can be seen in Figure 9 below.
NOTE: Now that you can select instances for each displayed parameter, you do not need to configure this menu. This menu entry is retained for backward compatibility.

Figure 9 – Device Selection Screen
The “NA” column of the menu displays the node address the device is using.
The “Manufacturer” column of the menu displays the manufacturer of the device.
The “Model” column displays the model number of the device.
The “SN#” column displays the serial number of the device, so that any of two or more devices of the same manufacturer and model number may be distinguished from one another.
The “Status” column indicates whether the device is currently connected to the bus and is responding to queries (“Online”), or has been disconnected from the bus, has lost power, or for some other reason is not responding to queries (“Offline”).
The “Display” column indicates whether data from that
particular device is accepted for display by the DSM410
(“On”) or that the DSM410 ignores data transmitted by this device (“Off”). By
scrolling to the device and pressing the Enter key (![]() ), you may then use the Scroll
Up (
), you may then use the Scroll
Up (![]() )
and Scroll Down (
)
and Scroll Down (![]() ) keys to toggle the “Display”
status for this particular device. Once you are satisfied with the state of the
“Display” setting, press the Enter key (
) keys to toggle the “Display”
status for this particular device. Once you are satisfied with the state of the
“Display” setting, press the Enter key (![]() ) to accept the setting.
) to accept the setting.
The DSM410 will retain information on devices that have been removed from the bus or powered down (“Offline”) so that when they are placed back on the bus, they will assume their prior “Display” setting.
5.2.4 Display Settings Menu
The display settings menu allows you to change parameters related to display operation.

Figure 10 – DSM410 Display Settings Screen
5.2.4.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
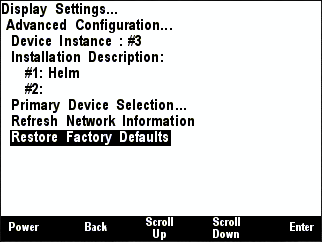
Figure 11 – DSM410 Advanced Configuration
5.2.4.1.1 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See section 3.3.4 for details on how to enter a textual value.
5.2.4.1.2 Primary Device Selection
Not all the data displayed by the DSM410 can be taken directly off the NMEA 2000 bus. Some require calculations with other parameters before the desired value can be displayed. An example would be the display of ground relative wind. In this case, the wind measured by the weather station needs to be combined with the vessel heading, course over ground, and speed over ground.
The instance number of the weather station is specified for each control.
This table provides the instance numbers of the other parameters used in the calculations.
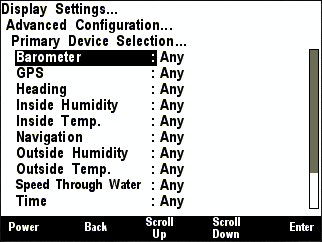
Figure 12 – DSM410 Primary Device Selection
5.2.4.1.3 Refresh Network Information
The Device Configuration (5.2.3.1) and Device Selection (5.2.3.2) menus display a list of devices that have been detected on the NMEA2000 bus. This list is kept in memory permanently to reduce the overhead of requesting device information each time one of these pages is requested.
Pressing the Enter key while this selection is highlighted will clear the list of devices. It will be necessary to perform this action to remove traces of devices that have been removed from the bus.
5.2.4.1.4 Restore Factory Defaults
This option restores all settings on the DSM410 device to their factory default state.
5.2.4.2 Advanced Information
The Advanced Information Page displays information pertaining to the permanent setup and configuration of the DSM410.
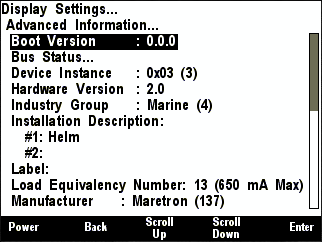
Figure 13 – DSM410 Advanced Information Screen
Most of the items within the Advanced Information… menu are obvious and not described here, although a less obvious menu item (Bus Status…) is described below.
5.2.4.2.1 Bus Status
The DSM410 is capable of monitoring the NMEA 2000® network and displaying certain statistics.
Baud Rate: the speed capability of the connected network given in bits per second (bps),
Voltage: the network voltage as measured by the DSM410 in Volts,
Traffic: the percent usage of the total available bandwidth measured by the DSM410,
Receive Rate: the DSM410 measured received rate in frames per second (fps),
Transmit Rate: the DSM410 measured transmit rate in frames per second (fps),
Error Count: the DSM410 measured error frames since entering the Bus Status screen,
Receive Counter: the number of DSM410 measured received frames, and
Transmit Counter: the number of DSM410 measured transmitted frames.
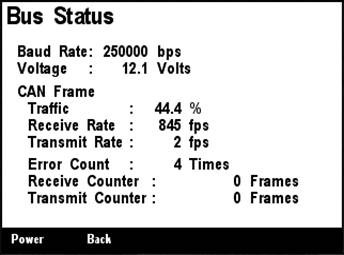
Figure 14 – Bus Status Display
5.2.4.3 Backlight
The DSM410 has three user-programmable lighting levels which
may be cycled through using the Lights key (![]() ) on the keypad while the DSM410
is operating in favorite screens mode. Each time you quick press the Lights key
(
) on the keypad while the DSM410
is operating in favorite screens mode. Each time you quick press the Lights key
(![]() ) in favorite screens mode, the DSM410 backlight will transition between the “Low” setting, the “Medium” setting, and the
“High” setting Note that a quick press of the Lights key (
) in favorite screens mode, the DSM410 backlight will transition between the “Low” setting, the “Medium” setting, and the
“High” setting Note that a quick press of the Lights key (![]() ) changes the screen
intensity or backlight while a long press changes the color palette as
described in Section 5.2.4.4. The Backlight menu allows you to program the
“Low”, “Medium”, and “High” brightness levels. The value that appears next to
the appropriate setting is measured in percent of full brightness. The
Backlight menu can be seen in Figure 15 below.
) changes the screen
intensity or backlight while a long press changes the color palette as
described in Section 5.2.4.4. The Backlight menu allows you to program the
“Low”, “Medium”, and “High” brightness levels. The value that appears next to
the appropriate setting is measured in percent of full brightness. The
Backlight menu can be seen in Figure 15 below.
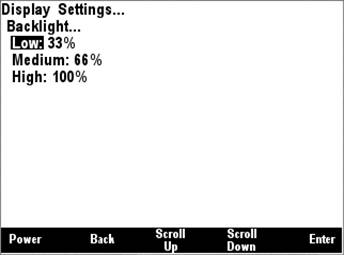
Figure 15 – Backlight Menu
5.2.4.4 Color Setup
The DSM410 has eight user-programmable color palettes. The default color palettes are as follows:
· Color Set #1 – White Back Ground, Black Foreground
· Color Set #2 – Red Back Ground, Black Foreground
· Color Set #3 – Blue Back Ground, Black Foreground
· Color Set #4 – Green Back Ground, Black Foreground
· Color Set #5 – Black Background, White Foreground
· Color Set #6 – Black Background, Red Foreground
· Color Set #7 – Black Background, Blue Foreground
· Color Set #8 – Black Background, Green Foreground
Choosing the “Color Setup…” menu item from the main “Display Settings…” menu takes you to the screen shown in Figure 16.
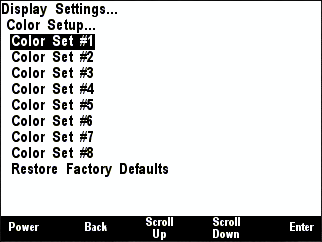
Figure 16 – Color Palette Selection Screen
Use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() )
keys to move the highlight to the color set that you want to change, and then
press the Enter key (
)
keys to move the highlight to the color set that you want to change, and then
press the Enter key (![]() ). Selecting “Color Set #1”
takes you to the screen shown in Figure 17.
). Selecting “Color Set #1”
takes you to the screen shown in Figure 17.
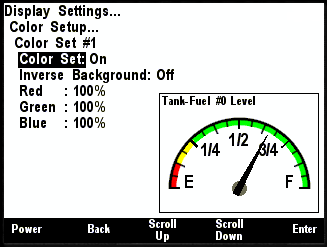
Figure 17 – Color Palette Configuration Screen
You can enable or disable Color Set #1 by changing the
“Color Set:” to “Off”. This will disable Color Set #1 while changing between
color palettes when using a long press of the Lights key (![]() )
when the DSM410 is operating in favorite screens mode. Change the “Color Set:”
back to “On” to enable this color palette.
)
when the DSM410 is operating in favorite screens mode. Change the “Color Set:”
back to “On” to enable this color palette.
Notice that Color Set #1 has a white background (100% Red,
100% Green, and 100% Blue equals white) and that the foreground color is black.
You can adjust the three different colors to achieve different color
backgrounds. Use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() )
keys to move the highlight to the color you want to change, and then press the
Enter key (
)
keys to move the highlight to the color you want to change, and then press the
Enter key (![]() ). Use the Scroll Up (
). Use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys with the percentage
number selected to change that particular color’s intensity. You can also
switch the background color to the foreground color by changing the Inverse
Background to “On”. The background will switch to black and the percentage
color settings are now used to define the foreground color.
) keys with the percentage
number selected to change that particular color’s intensity. You can also
switch the background color to the foreground color by changing the Inverse
Background to “On”. The background will switch to black and the percentage
color settings are now used to define the foreground color.
The “Restore Factory Defaults” menu selection will restore all of the color sets to their factory default states.
5.2.4.5 Demo Mode
The DSM410 has a demo mode suited for displaying the capabilities of the unit. It causes the DSM410 to operate in a “simulated data” mode, where the DSM410 will install a set of pre-defined favorite screens and other configuration and will then display only the internally generated simulated data and will ignore any data arriving over the NMEA 2000® bus. While in demo mode, the DSM410 will display a “Demo” indicator in the upper right hand corner of the screen. Programming this option to “On (Show Room Mode)” or “On (Boat Show Mode, No Auto Reset)” will cause the DSM410 to enter the demo mode while programming this option for “Off (Normal Use Mode)” will cause the DSM410 to return to using data from the NMEA 2000® bus.
In order to be able to demonstrate all of the DSM410’s capabilities, the unit allows the user to setup and configure different screens while in demo mode. However, in a show room environment and five minutes after the last button push (i.e., the customer has walked away the demo unit), the DSM410 will reset itself to the default screens. There are others times where it is important that the DSM410 doesn’t automatically reset after five minutes to the default screens, for example at a boat show where it is desired to show specific screens while running in the demo mode and thus the “Boat Show Mode”.
WARNING: All data displayed in demo mode is simulated. Do not use this data for vessel monitoring or navigation purposes.
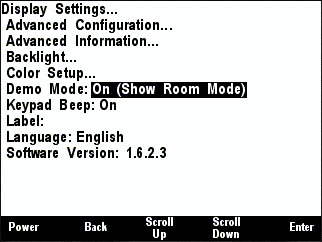
Figure 18 – Setting the Demo Mode
5.2.4.6 Keyboard Beep
The DSM410 has an annunciator that can be programmed to beep every time a key is pressed. Conversely, the keypad beep may be disabled if desired.
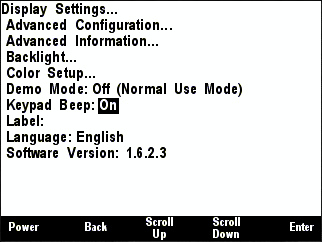
Figure 19 – Setting the Keyboard Beep Option
5.2.4.7 Label
Each DSM410 can be given a software label. Normally this label will indicate the position of the DSM410 and is used by the Alert System to identify one DSM410 from another.
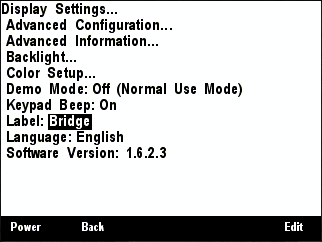
Figure 20 – Editing the DSM410 Label
5.2.4.8 Language
The DSM410 currently supports two languages: English and
Dutch (Nederlands). Support for other languages is planned for future firmware
releases. To change the currently used language, use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to move the highlight to
the “Language:” menu item, and then press the Enter key (
) keys to move the highlight to
the “Language:” menu item, and then press the Enter key (![]() ) to
move the highlight to the language selection on the right. Use the Scroll Up (
) to
move the highlight to the language selection on the right. Use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to change the selection
to the desired value, and then press the Enter key (
) keys to change the selection
to the desired value, and then press the Enter key (![]() ) to confirm
your selection. The DSM410 will then reset itself, after which the selected
language will be used for menus and titles.
) to confirm
your selection. The DSM410 will then reset itself, after which the selected
language will be used for menus and titles.
5.2.4.9 Software Version
This field displays the version of the Firmware running in the DSM410.
5.2.5 Favorite Screens Mode
The DSM410 supports two methods of operation in favorites
mode: “Auto”, in which the DSM410 automatically cycles through all favorite
screens that have been enabled for Auto mode, and “Manual”, in which the DSM410 continues to display the currently displayed favorite screen until you press the Scroll
Up (![]() ) or Scroll Down (
) or Scroll Down (![]() )
keys, in which the DSM410 will display the next higher or lower numbered
favorite screen, respectively, that is enabled for Manual mode.
)
keys, in which the DSM410 will display the next higher or lower numbered
favorite screen, respectively, that is enabled for Manual mode.
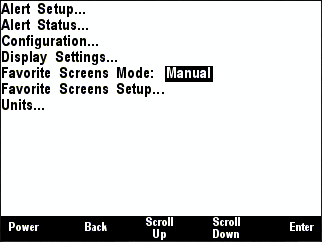
Figure 21 – Setting the Favorite Screens Mode
5.2.6 Favorite Screens Setup Menu
The DSM410 supports the configuration of sixteen favorite screens. The favorite setup screen allows you to select which of the sixteen favorite screens you wish to configure.
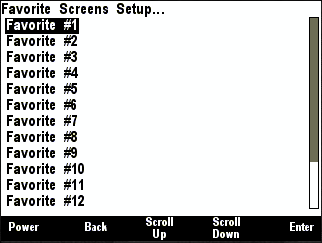
Figure 22 – Favorite Screens Setup Screen
Once you have selected a favorite screen to configure, you will see the screen shown in Figure 23 . The exact format of the setup screen will depend on the format chosen.
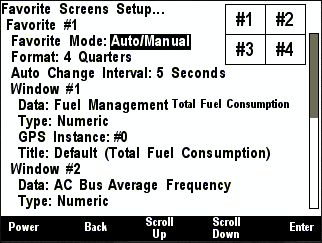
Figure 23 – Favorite Screen Parameters
5.2.6.1 Favorite Mode
This entry allows you to select in which display method of favorite screens mode this particular favorite screen is enabled. This parameter has four possible settings:
Off – this favorite screen is disabled and is not displayed
Auto – this favorite screen is displayed only in Auto mode
Manual – this favorite screen is displayed only in Manual mode
Auto/Manual – this favorite screen is displayed in both Auto and Manual modes
5.2.6.2 Format
The DSM410 offers many methods and formats of displaying multiple data items at a given time. This parameter is used to program how many data items will appear on this particular favorite screen and in what sizes these items will appear. A graphical preview of the selected format will appear in the upper right hand corner of the display. This parameter has the following settings:
· Full Window – one parameter will be displayed, taking up the entire screen
· 2/3 Top – 1/3 Bottom – two parameters will be displayed, the first occupying the top 2/3 of the screen and the second occupying the bottom 1/3 of the screen
· 1/3 Top – 2/3 Bottom – two parameters will be displayed, the first occupying the top 1/3 of the screen and the second occupying the bottom 2/3 of the screen
· Half Left – Qtr – Qtr – three parameters will be displayed, the first occupying the left half of the screen, the second occupying the upper right hand corner of the screen and the third occupying the lower right hand corner of the screen
· Qtr – Half – Qtr – three parameters will be displayed, the first occupying the top left hand corner of the screen, the second occupying the upper right hand corner of the screen, and the third occupying the lower right hand corner of the screen
· Half Left/Right – two parameters will be displayed, the first occupying the left half of the screen, and the second occupying the right half of the screen
· Half Top/Bottom – two parameters will be displayed, the first occupying the top half of the screen and the second occupying the bottom half of the screen
· 2 Qtrs – Half Bottom – three parameters will be displayed, the first occupying the upper left hand corner of the screen, the second occupying the upper right hand corner of the screen, and the third occupying the bottom half of the screen
· Half Top – 2 Qtrs – three parameters will be displayed, the first occupying the top of the screen, the second occupying the lower left hand corner of the screen, and the third occupying the lower right hand corner of the screen
· Four Quarters – four parameters will be displayed, the first occupying the upper left hand corner of the screen, the second occupying the upper right hand corner of the screen, the third occupying the lower left hand corner of the screen, and the fourth occupying the lower right hand corner of the screen
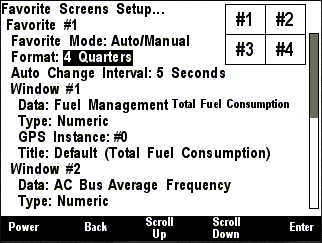
Figure 24 – Setting the Favorite Screen Format
5.2.6.3 Auto Change Interval
In Auto mode, this parameter determines the amount of time this favorite screen is displayed before the DSM410 automatically cycles to the next higher numbered favorite screen in the auto mode. This parameter is programmable to anywhere between 1 second and 180 seconds.
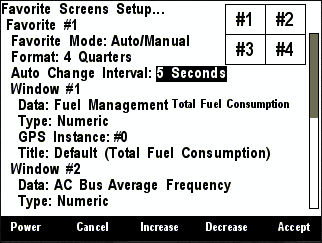
Figure 25 – Setting the Auto Change Interval
5.2.6.4 Window Data
The Window Data section of the menu allows you to select a
particular type of data to be displayed in each part of the screen. Selecting
the data to be displayed is a two-step process. First, press the Enter key (![]() ) and select the
category of data to be displayed.
) and select the
category of data to be displayed.
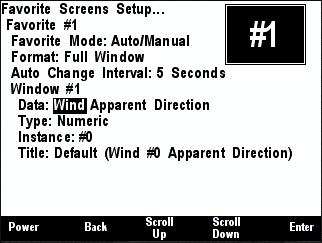
Figure 26 – Selecting the Data Category
Once you select the category, press the Enter key (![]() ) to accept
this category, at which time the highlight will move to the data type field,
where you can display the particular data type from the selected category to be
displayed as shown in Figure 27.
) to accept
this category, at which time the highlight will move to the data type field,
where you can display the particular data type from the selected category to be
displayed as shown in Figure 27.
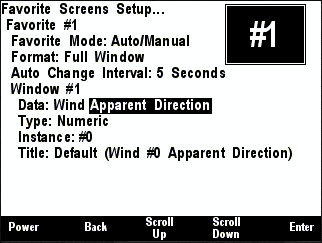
Figure 27 – Selecting the Data to be displayed
5.2.6.4.1 Type
Once you have selected the particular data item to be displayed; you may select the type of data display to be used for that data item. The available display types vary depending upon the selected data item, but may include any of the following (see Section 7 for descriptions of the available display types).
· Anchor Watch ( See Section 7.1 on page 210)
· Bar Graph (see Section 7.2 on page 211)
· Compass Rose (see Section 7.3 on page 211)
· Date (see Section 7.4 on page 213)
· Date/Time (see Section 7.5 on page 213)
· Gauge (see Section 7.4 on page 213)
· GPS Status (see Section 7.7 on page 215)
· Half Gauge (see Section 7.8 on page 216)
· Indicator Light (see Section 7.9 on page 216)
· Numeric (see Section 7.8 on page 216)
· Numeric/Precision (see Section 7.11 on page 220)
· Rolling Road (see Section 7.11 on page 220)
· Line Graph (see 7.13 on page 222)
· SMS Status (see Section 7.14 on page 222)
· Time (hh:mm) (see Section 7.15 on page 222)
· Time (hh:mm:ss) (see Section 7.16 on page 223)
· VDR Status (see Section 7.17 on page 223)
· Weather Screen (see Section 7.14 on page 222)
· Wind Rose (see Section 7.19 on page 226)
· Moon Phase (see Section 7.20 on page 226)
· SMS Signal Strength Bar (see Section 7.21 on page 226)
· Trim Tabs Bar Graphs (see Section 7.21 on page 226)
· Swing Meter (see Section 7.23 on page 227)
· Tank Gauge (see Section 7.24 on page 228)
· Watermaker Status (see Section 7.25 on page 228)
· Switch/Breaker Display (see Section 7.25 on page 229)
5.2.6.4.2 Instance
Instance is used to specify which product on the network will be used as the source of the displayed information. For example, there may be two GPS’s on the network each of which will have a unique instance assuming the network has been properly configured. You use the instance field to tell the DSM410 which GPS to use for displaying data. Most of the time, the DSM410 simply displays a single parameter from a device on the network so you will only see one “Instance” entry. There are other parameters that the DSM410 displays that are a combination of information from multiple products on the network. For example, fuel economy is a combination of fuel rate and Speed Over Ground (SOG) so you will see two “Instance” entries, one to specify the engine(s) and one to specify the GPS for SOG.
5.2.6.4.3 Alert
In setting up the Anchor Watch display type, this field is used to specify the associated Anchor Watch Alert priority. The list from which the selection is made will be limited to the list of Anchor Watch Alerts already created in the system.
5.2.6.4.4 Title
Each display type has a user defined title that is displayed above the control. The contents of the title are specified in this field. There are three options:
· Default – the title of the control is the same as the name of the parameter being displayed.
· Label – the label of the parameter. The label is programmed into the remote device, and will be transferred to the title when it is received from the remote device. This means that if the label of the remote device is changed, the title of the control will be automatically updated to match the new label.
· Custom – the title is entered by the user using the method described in section 3.3.4.
5.2.7 Units Menu
The Units Menu allows you to set the desired display units for the DSM410. The following sections provide more detail on the individual unit settings.
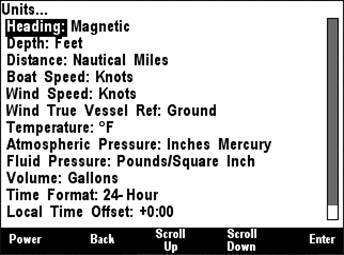
Figure 28 – DSM410 Units Menu
5.2.7.1 Heading
This menu item allows you to select whether heading, course, and bearing information is displayed in true or magnetic measurements. True heading can only be displayed if a variation is available on the NMEA 2000® bus.
If the DSM410 is not showing heading or COG (i.e., no needle on compass rose or dashes for digital displays), it’s probably a good indication that variation isn’t available on the network. The DSM410 can’t calculate true heading given magnetic heading from a compass if variation isn’t available. Likewise, the DSM410 can’t calculate magnetic course given true course from a GPS if variation isn’t available. You can setup a favorite screen to display variation, which will help you determine whether or not you have a product on the network broadcasting variation information (Maretron’s GPS’s use the World Magnetic Model to broadcast variation).
5.2.7.2 Depth
This menu item allows you to select the units to be used for the display of all depth-related information. Units that may be selected are the following:
· Meters
· Fathoms
· Feet
5.2.7.3 Distance
This menu item allows you to select the units to be used for the display of all distance-related information. Units that may be selected are the following:
· Nautical Miles
· km
· Statute Miles
5.2.7.4 Boat Speed
This menu item allows you to select the units to be used for the display of all boat speed-related information. Units that may be selected are the following:
· Knots
· Miles/Hour
· Km/Hour
· Meters/second
5.2.7.5 Wind Speed
This menu item allows you to select the units to be used for the display of all wind speed-related information. Units that may be selected are the following:
· Knots
· Miles/Hour
· Km/Hour
· Beaufort
· Meters/second
5.2.7.6 Wind True Vessel Ref.
This menu items allows you to select whether the true wind direction and speed referenced to the vessel are relative to the water or the ground. Sailors are generally interested in measurements relative to the water while power boaters are interested in measurements relative to the ground. Station is for home applications (i.e., fixed mounting location unlike a vessel that changes direction). Formats that may be selected are the following:
· Water
· Ground
· Station
5.2.7.7 Temperature
This menu item allows you to select the units to be used for the display of all temperature-related information. Units that may be selected are the following:
· °F
· °C
5.2.7.8 Atmospheric Pressure
This menu item allows you to select the units to be used for the display of atmospheric (barometric) pressure. Units that may be selected are the following:
· Inches Mercury (in Hg)
· Bar
· Millibars
· Millimeters Mercury (mm Hg)
· kPa
5.2.7.9 Fluid Pressure
This menu item allows you to select the units to be used for the display of fluid pressure. Units that may be selected are the following:
· Pounds/Square Inch (PSI)
· kPa
· Bar
5.2.7.10 Volume
This menu item allows you to select the units to be used for the display of all liquid volume-related information. Units that may be selected are the following:
· Liters
· Imperial Gallons (UK Gallons)
· Gallons (US Gallons)
5.2.7.11 Time Format
This menu item allows you to select whether measurements indicating a time of day are displayed in 12-Hour (AM/PM) format or 24-Hour (military) format.
5.2.7.12 Local Time Offset
This menu item allows you to indicate the offset of local time relative to Universal Time, Coordinated (UTC, also known as Greenwich Mean Time, or GMT), in hours and minutes. For instance, Eastern Standard Time (EST) would use an offset value of -5:00.
5.2.7.13 Date Format
This menu item allows you to select the format of any displayed dates.
Formats that may be selected are the following:
· MM-DD-YYYY (01-31-2005)
· DD-MM-YYYY (31-01-2005)
· MMM-DD-YYYY (JAN-31-2005)
· DD-MMM-YYYY (31-JAN-2005)
5.2.7.14 Force
This menu item allows you to select the units to be used for the display of force. Units that may be selected include the following:
· Newtons
· Kilograms
· Pounds
5.2.7.15 Mass
This menu item allows you to select the units to be used for the display of mass. Units that may be selected include the following:
· Kilograms
· Pounds
5.2.7.16 Resistance
This menu item allows you to select the units to be used for the display of resistance. Units that may be selected include the following:
· Ohms
· Kilohms
5.2.7.17 Motion Distance
This menu item allows you to select the units to be used for the display of distance. Units that may be selected include the following:
· mm
· cm
· Meters
· Inches
· Feet
5.2.7.18 Motion Velocity
This menu item allows you to select the units to be used for the display of velocity. Units that may be selected include the following:
· Meters/Second
· Inches/Second
· Feet/Second
· km/Hour
· miles/hour
· knots
5.2.7.19 Motion Velocity
This menu item allows you to select the units to be used for the display of velocity. Units that may be selected include the following:
· Meters/Second
· Inches/Second
· Feet/Second
· km/Hour
· miles/hour
· knots
5.2.7.20 Motion Acceleration
This menu item allows you to select the units to be used for the display of acceleration. Units that may be selected include the following:
· Meters/Second2
· G
· Feet/Second2
5.2.7.21 Angular Velocity
This menu item allows you to select the units to be used for the display of angular velocity. Units that may be selected include the following:
· Degrees/Second
· Degrees/Minute
· Radians/Second
· Radians/Minute
· RPM
5.2.7.22 Angular Acceleration
This menu item allows you to select the units to be used for the display of angular acceleration. Units that may be selected include the following:
· Degrees/Second2
· Degrees/Minute2
· Radians/Second2
5.3 Control Mode
Control mode may be entered from the favorite screens mode of the display to perform certain control and reset functions. The following functions may be performed in control mode:
· Switch/Breaker – may be switched on and off (see section 7.25 for details)
· Anchor Watch – Anchor Drop position may be set to the current GPS position (see section 7.1 for details)
· Engine Trip Fuel Used – may be reset to zero for fuel flow transducers that are capable of being reset via the 126208 NMEA 2000® command message, such as the Maretron FFM100
· Trip Volume – may be reset to zero for fluid flow transducers that are capable of being reset via the 126208 NMEA 2000® command message, such as the Maretron FFM100
· Trip Log – may be reset to zero for log transducers that are capable of being reset via the NMEA 2000® command message, such as the Maretron DST110, may be reset with the control mode of the display – see Section 5.2.7.14 for details
For resetting “Engine Total Fuel Used”, “Trip Volume”, or “Trip Log”, use the following procedure to reset the total in the transducer providing the value.
In normal operating mode, use the “Scroll Up” and “Scroll Down” keys to change to the screen containing the display to be reset. Once that screen is displayed, follow these steps to reset the appropriate display:
- Press the “Enter” key for approximately one second. This will place the display into “Control mode”, and one of the controllable items on the screen will be highlighted with a thick border.
- If there is more than one controllable item on the screen, you may use the “Scroll Up” and “Scroll Down” keys to change the highlight to the display to be reset.
- Once the display to be reset is selected, then press the “Power” key. You will then see a confirmation popup asking whether it is okay to set the Anchor Drop position to the current position. If you answer “Yes”, then the Anchor Drop position will be set to the current GPS position.
- To exit the control mode, press the “Lights” key to return to normal operating mode. The highlight will disappear.
6 Device Configuration
The “Device Configuration…” menu enables you to configure certain types of devices on the NMEA 2000® network. Devices that may be configured using the DSM410 include the following:
Airmar Depth, Speed, and Temperature Transducers (DST800, DT800, P39, P79, B122, ST850, ST800, HT200) – reset trip log, set depth offset, speed calibration, and temperature offset (if applicable)
Bennett EP-30 – Calibrate trim tabs.
Maretron Alternating Current Monitor (ACM100) – set circuit type, device type, instance number, and label. Reset the total energy recorded.
Maretron Annunciator (ALM100) – set the data instance number and the label. Test the alarm.
Maretron Current Loop Monitor (CLM100) – set the channel operating mode, set transducer characteristics, and set damping
Maretron Direct Current Monitor (DCM100) – set the battery type, and calibrate the current sensor zero offset.
Maretron Direct Current Relay Module (DCR100) – set the operating mode of each channel, lock switches, set power up state, and control state of switches
Maretron Monochrome Display (DSM200) – allows configuration of other DSM200s on the network
Maretron Color Display (DSM150, DSM250, DSM410) – allows configuration of other DSM150s, DSM250s, and DSM410s on network
Maretron Depth/Speed/Temp. Transducer (DST100) – set transducer offset, zero trip distance log
Maretron Depth/Speed/Temp. Transducer (DST110) – reset trip log, set depth offset, speed calibration, and temperature offset
Maretron Engine Monitoring System (EMS100) – set the gauge types for boost pressure, drive trim, oil pressure and water temperature. Preset the engine hours.
Maretron Fuel Flow Monitor (FFM100) – Set operating mode, channel direction, K-factor, temperature coefficient.
Maretron Fluid Pressure Monitor (FPM100) – set the operating mode of each channel, perform tank levels calibration, and set pressure sender characteristics.
Maretron GPS Antenna/Receiver (GPS100) – enable and disable WAAS functionality, set the GPS mode, program the elevation, PDOP and SNR masks, set the antenna altitude, force a cold start, enable/disable individual PGN transmission, and reset the unit back to its factory defaults.
Maretron GPS Antenna/Receiver (GPS200) – enable and disable WAAS functionality, force a cold start, enable/disable individual PGN transmission, and reset the unit back to its factory defaults.
Maretron Internet Protocol Gateway (IPG100) – set IP connection parameters, set N2KServer password, view N2KServer information, and reset the unit back to its factory defaults.
Maretron J1939 to NMEA 2000 Gateway (J2K100) – set J1939 node address, set NMEA 2000® engine/transmission instance, enable pass-through of J1939 diagnostic messages, and enable/disable individual NMEA 2000® PGN transmissions.
Maretron Network Bus Extender (NBE100) – set device label.
Maretron Rudder Angle Adapter (RAA100) – set rudder number, operating mode, and calibrate rudder position.
Maretron Run Indicator Monitor (RIM100) – set data instance for the device, and labels for the device and each channel.
Maretron Switch Indicator Monitor (SIM100) – set data instance for the device, and labels for the device and each channel. Set each channel mode.
Maretron SMS (Text) Module (SMS100) – set device instance and installation description for the device, verify cellular network connectivity, and perform send/receive tests.
Maretron Solid Sate Compass (SSC200) – set installation offset, perform magnetic deviation calibration, check magnetic deviation calibration status, invert installation, configure magnetic variation settings, setup NMEA0183 interface, program rate of turn damping, zero the rate-of-turn offset, and enable/disable individual NMEA 2000® PGN transmissions.
Maretron Solid Sate Compass (SSC300) – set installation offset, perform magnetic deviation calibration, check magnetic deviation calibration status, invert installation, configure magnetic variation settings, setup NMEA0183 interface, program rate of turn damping, zero the rate-of-turn offset, and enable/disable individual NMEA 2000® PGN transmissions.
Maretron Tank Level Adapter (TLA100) – set tank type and tank number, set operating mode, set tank capacity, and calibrate for irregular shaped tanks.
Maretron Tank Level Monitor Shallow (TLM100) – set tank type and tank number, set operating mode, set tank capacity, and calibrate for irregular shaped tanks.
Maretron Tank Level Monitor Gasoline (TLM150) – set tank type and tank number, set operating mode, set tank capacity, and calibrate for irregular shaped tanks.
Maretron Tank Level Monitor Deep (TLM200) – set tank type and tank number, set operating mode, set tank capacity, and calibrate for irregular shaped tanks.
Maretron Temperature Monitor (TMP100) – set device label and channel instance, temperature source (type) and label.
Maretron NMEA 2000 to USB gateway (USB100) – allows configuration of USB100s on network
Maretron Vessel Data Recorder (VDR100) – set device label.
Maretron Ultrasonic Wind and Weather Station (WSO100) – set installation offset, set wind damping rates, and enable/disable individual NMEA 2000® PGN transmissions.
More device types will be included in future firmware releases.
In each case, the contents of the Device Configuration menus may vary depending on the version of the firmware within the device.
The “Device Configuration…” menu is shown in Figure 29.
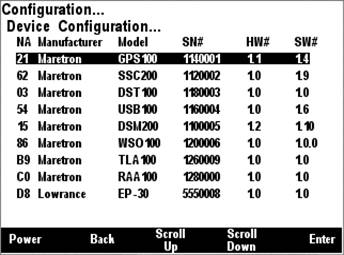
Figure 29 – Device Configuration Screen
The “NA” column of the menu displays the node address the device is using.
The “Manufacturer” column of the menu displays the manufacturer of the device.
The “Model” column displays the model number of the device.
The “SN#” column displays the serial number of the device, so that any of two or more devices of the same manufacturer and model number may be distinguished from one another.
The “HW” column shows the device hardware version.
The “SW” column shows the device software version (firmware version).
6.1 Airmar Depth/Speed/Temperature Transducers
The DSM410 supports configuration and calibration of the following Airmar Depth/Speed/Temperature transducers that have NMEA 2000® interfaces:
· DST800
· DT800
· P39
· P79
· B122
· ST850
· ST800
· HT200
The following calibration functions are supported (not all functions apply to every model of transducer):
· Reset trip log
· Set depth Offset
· Perform Speed Calibration
· Program Temperature Offset
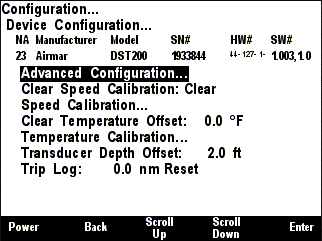
Figure 30 – Airmar Depth/Speed/Temperature Transducer Configuration Screen
6.1.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
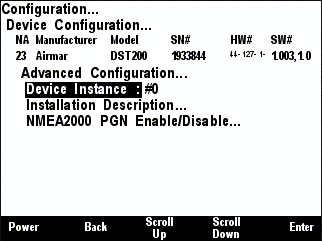
Figure 31 – Airmar Transducer Advanced Configuration Screen
6.1.2 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.1.3 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See section 3.3.4 for details on how to enter a textual value.
6.1.4 NMEA2000 PGN Enable/Disable
The transducer transmits several different NMEA2000 PGN’s which can be turned on or turned off by the DSM410 display. Pressing the Enter key with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410 to display the NMEA2000 PGN Enable/Disable screen.
You can enable or disable the transmission of these
messages, or set the frequency of transmission of the message by pressing the
Enter key (![]() ) on the message to be configured. Options are:
) on the message to be configured. Options are:
- Off – The message will not be transmitted
- On – The message will be transmitted at its default NMEA 2000® rate.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.1.5 Clear Speed Calibration
The Clear Speed Calibration configuration parameter
shows you the currently used correction factor. All measured STW readings are
multiplied by this number before being transmitted over the NMEA 2000®
network. You can remove the correction factor by pressing the Enter key (![]() ) with the
“Clear Speed Calibration:” menu item selected. And then choose “Clear” using
Scroll Up (
) with the
“Clear Speed Calibration:” menu item selected. And then choose “Clear” using
Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys followed by the Enter key
(
) keys followed by the Enter key
(![]() ). This
changes the correction factor back to 1 such that all subsequent measured STW
readings are no longer adjusted before begin transmitted over the NMEA 2000®
network.
). This
changes the correction factor back to 1 such that all subsequent measured STW
readings are no longer adjusted before begin transmitted over the NMEA 2000®
network.
6.1.6 Speed Calibration
The Airmar speed transducer speed through water (STW)
initial accuracy is significantly affected by the location or placement of the speed
transducer within the hull. The speed transducer can be corrected for these
inaccuracies using the speed calibration procedure. You calibrate the speed
transducer STW by pressing the Enter key (![]() ) with the “Speed Calibration…”
menu item selected which results in the screen shown in Figure 78.
) with the “Speed Calibration…”
menu item selected which results in the screen shown in Figure 78.
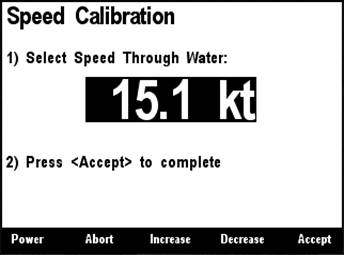
Figure 32 – Calibrating the Airmar Speed Transducer Speed
The speed calibration screen shown in Figure 78 indicates
the STW as measured by the Airmar speed transducer, which can be changed to the
transmitted STW by following these steps. First, pick a speed where you are
most concerned with the best accuracy. Next, bring the boat up to the desired
speed using some other source, perhaps the GPS speed over ground (SOG).
Remember that the SOG does not necessary reflect the STW because of currents,
and drift due to winds, so you should do this in an area where you are sure
there are no currents and calm winds. Finally, use the Increase (![]() ) and Decrease (
) and Decrease (![]() ) keys to
adjust the display value until it matches the known speed of the boat. Press
the Accept (
) keys to
adjust the display value until it matches the known speed of the boat. Press
the Accept (![]() ) key to accept the value when you are satisfied. If you do not wish to
perform speed calibration at this time, press the Abort (
) key to accept the value when you are satisfied. If you do not wish to
perform speed calibration at this time, press the Abort (![]() ) key and the speed
calibration will not be altered.
) key and the speed
calibration will not be altered.
6.1.7 Clear Temperature Offset
The Clear Temperature Offset configuration parameter
shows you the currently used temperature correction offset. All measured sea
temperature readings have this value added to them before being transmitted
over the NMEA 2000® network. You can set the correction offset to
zero by pressing the Enter key (![]() ) with the “Clear Speed
Calibration:” menu item selected. And then choose “Clear” using Scroll Up (
) with the “Clear Speed
Calibration:” menu item selected. And then choose “Clear” using Scroll Up (![]() ) or Scroll
Down (
) or Scroll
Down (![]() )
keys followed by the Enter key (
)
keys followed by the Enter key (![]() ). This changes the correction
factor back to 0 such that all subsequent measured sea temperature readings are
no longer adjusted before begin transmitted over the NMEA 2000®
network.
). This changes the correction
factor back to 0 such that all subsequent measured sea temperature readings are
no longer adjusted before begin transmitted over the NMEA 2000®
network.
6.1.8 Temperature Calibration
The temperature calibration screen shown below indicates the
sea temperature as measured by the Airmar temperature transducer, which can be
changed to the actual sea temperature by following these steps. Use the
Increase (![]() ) and Decrease (
) and Decrease (![]() ) keys to adjust the display
value until it matches the known sea temperature. Press the Accept (
) keys to adjust the display
value until it matches the known sea temperature. Press the Accept (![]() ) key to
accept the value when you are satisfied. If you do not wish to perform
temperature calibration at this time, press the Abort (
) key to
accept the value when you are satisfied. If you do not wish to perform
temperature calibration at this time, press the Abort (![]() ) key and the temperature
calibration will not be altered.
) key and the temperature
calibration will not be altered.
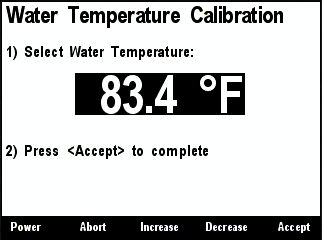
Figure 33 – Airmar Temperature Transducer Water Temperature Calibration Screen
6.1.9 Transducer Depth Offset
The DSM410 can set the transducer depth offset parameter in an Airmar depth transducer. If you are interested in the actual water depth (as opposed to the depth beneath the keel), then you should program a positive value equal to the distance from the waterline to the depth of the depth transducer. The DSM410 will then add the measured depth of the water (as seen by the depth transducer) to the programmed offset value to produce the total water depth. If you are interested in the depth of water beneath the keel, then you should program a negative value equal to the distance between the depth transducer and the bottom of the keel. The display will then subtract the programmed offset from the measured depth of the water (as seen by the depth transducer) showing you the depth of water beneath the keel.
You program the transducer depth offset by pressing the Enter
key (![]() )
with the “Transducer Depth Offset:” menu item selected which results in the
screen shown in Figure.
)
with the “Transducer Depth Offset:” menu item selected which results in the
screen shown in Figure.
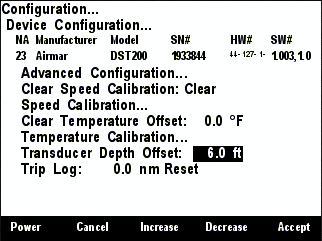
Figure 34 – Setting the Transducer Depth Offset in an Airmar Depth Transducer
With the offset value highlighted, you can change the offset
by using the Increase and Decrease keys (![]() or
or ![]() ).
Once you have selected the desired offset, push the Enter key (
).
Once you have selected the desired offset, push the Enter key (![]() ) to complete
the transducer depth offset calibration. This procedure actually programs the
offset value into the transducer such that all displays subsequently receive
the offset information. This means you don’t have to program multiple displays
each with the corresponding offset information as the information is stored at
a single place (at the source).
) to complete
the transducer depth offset calibration. This procedure actually programs the
offset value into the transducer such that all displays subsequently receive
the offset information. This means you don’t have to program multiple displays
each with the corresponding offset information as the information is stored at
a single place (at the source).
6.1.10 Trip Log
The DSM410 is capable of clearing the trip log counter
within an Airmar speed transducer. You zero the trip log by pressing the Enter
key (![]() )
with the “Trip Log:” menu item selected which results in the screen shown in Figure 80. Pressing the Accept (
)
with the “Trip Log:” menu item selected which results in the screen shown in Figure 80. Pressing the Accept (![]() ) key while the “Reset” menu
item is selected will complete the operation. Resetting the trip log zeroes the
transducer’s trip log such that all displays receive a zeroed value.
) key while the “Reset” menu
item is selected will complete the operation. Resetting the trip log zeroes the
transducer’s trip log such that all displays receive a zeroed value.
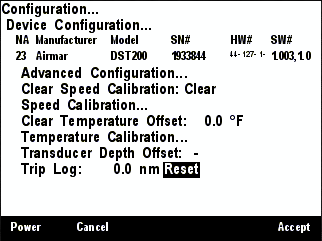
Figure 35 – Resetting the Airmar Speed Sensor Trip Distance Log
6.2 Bennett EP-30 (NMEA1) Trim Tabs Configuration
This describes the configuration of the Bennett EP-30 trim tabs firmware version 1.0.7 (“NMEA1” NMEA 2000 Trim Tab Indicator Kit). The EP-30 configuration menu is shown below in Figure 36 below, and currently has the single entry “Trim Tabs Calibration…”.
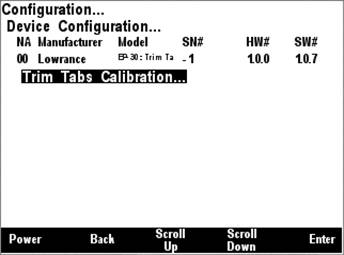
Figure 36 – EP-30 Trim Tabs Configuration Screen
6.2.1 Trim Tabs Calibration
The Bennett EP-30 (NMEA1) trim tabs calibration opening
screen is shown in Figure 37 below. The first step in calibration is to move
both trim tabs to the full up position, and then press the Accept (![]() ) key to begin the calibration process. You may also elect to abort the
calibration process at this time by pressing the Abort (
) key to begin the calibration process. You may also elect to abort the
calibration process at this time by pressing the Abort (![]() )
key.
)
key.
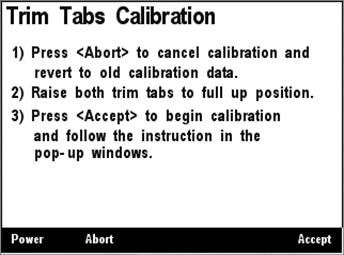
Figure 37 – EP-30 Trim Tabs Calibration Opening Screen
After you press the Accept (![]() ) key, a
screen, shown in Figure 38 below, appears, instructing you to now lower both
trim tabs to the full down position. It is important that you do this without
stopping in order for the calibration process to succeed.
) key, a
screen, shown in Figure 38 below, appears, instructing you to now lower both
trim tabs to the full down position. It is important that you do this without
stopping in order for the calibration process to succeed.
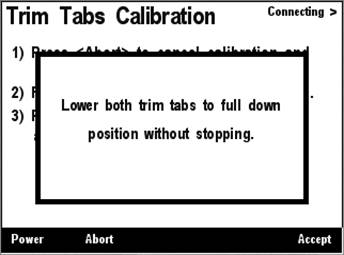
Figure 38 – EP-30 Intermediate Calibration Screen
After you have lowered both trim tabs to their full down position and a few seconds have elapsed, the screen shown in Figure 39 below should appear, indicating that the calibration of the trim tab sensors has completed successfully. You may now press any key to return to the previous menu.
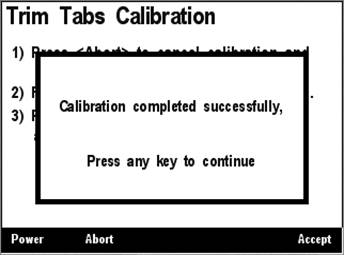
Figure 39 – EP-30 Calibration Success Message
6.3 Maretron ACM100 Configuration
This describes the configuration of the Maretron ACM100 firmware version 1.0.8.2.
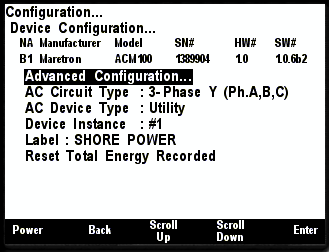
Figure 40 – ACM100 Configuration Screen
6.3.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
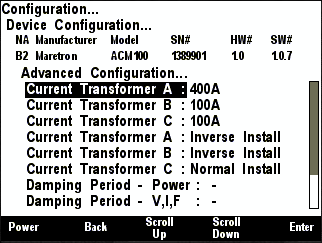
Figure 41 – ACM100 Advanced Configuration Screen
6.3.1.1 Current Transformer A
The ACM100 with firmware revision 1.0.7 or newer supports two different types of current sensors: the 100A current sensor included with the unit and an optional 400A current sensor. This menu entry allows you to indicate which type of current sensor you have installed for phase A.
6.3.1.2 Current Transformer B
The ACM100 with firmware revision 1.0.7 or newer supports two different types of current sensors: the 100A current sensor included with the unit and an optional 400A current sensor. This menu entry allows you to indicate which type of current sensor you have installed for phase B.
6.3.1.3 Current Transformer C
The ACM100 with firmware revision 1.0.7 or newer supports two different types of current sensors: the 100A current sensor included with the unit and an optional 400A current sensor. This menu entry allows you to indicate which type of current sensor you have installed for phase C.
6.3.1.4 Current Transformer A
If you notice that the power measurements of phase A are negative when they should be positive, or vice-versa, then the current transformer has been installed backwards. If this happens, then instead of reconnecting the current transformer, you may change the value of this parameter from the default value of “Normal Install” to “Inverse Install” to correct for this.
Valid options are:
· Inverse Install
· Normal Install
Use the Scroll Up and Scroll Down buttons to select the correct option, and then press Enter to save the value.
6.3.1.5 Current Transformer B
If you notice that the power measurements of phase B are negative when they should be positive, or vice-versa, then the current transformer has been installed backwards. If this happens, then instead of reconnecting the current transformer, you may change the value of this parameter from the default value of “Normal Install” to “Inverse Install” to correct for this.
Valid options are:
· Inverse Install
· Normal Install
Use the Scroll Up and Scroll Down buttons to select the correct option, and then press Enter to save the value.
6.3.1.6 Current Transformer C
If you notice that the power measurements of phase C are negative when they should be positive, or vice-versa, then the current transformer has been installed backwards. If this happens, then instead of reconnecting the current transformer, you may change the value of this parameter from the default value of “Normal Install” to “Inverse Install” to correct for this.
Valid options are:
· Inverse Install
· Normal Install
Use the Scroll Up and Scroll Down buttons to select the correct option, and then press Enter to save the value.
6.3.1.7 Damping Period – Power
If you feel that the monitored Power parameters are changing too quickly or too slowly on the display, you can adjust the damping that is applied to the output readings by adjusting this parameter. The default damping period is 5 seconds. You may change it to a value in the range of 0.2 seconds to 10 seconds. Use the Increase and Decrease buttons to select the correct option, and then press Enter to save the value.
6.3.1.8 Damping Period – V, I, F
If you feel that the monitored Voltage, Current, and Frequency parameters are changing too quickly or too slowly on the display, you can adjust the damping that is applied to the output readings by adjusting this parameter. The default damping period is 0.5 seconds. You may change it to a value in the range of 0.2 seconds to 10 seconds. Use the Increase and Decrease buttons to select the correct option, and then press Enter to save the value.
6.3.1.9 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See section 3.3.4 for details on how to enter a textual value.
6.3.1.10 NMEA2000 PGN Enable/Disable
The ACM100 Alternating Current transmits a number of the NMEA2000® PGNs which can be turned on or turned off by the DSM410 display. For reasons of compatibility with older NMEA2000 devices, some of these PGNs are redundant; disabling these PGNs will reduce the amount of traffic on the NMEA2000® bus. Pressing the Enter key with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410 to display the following screen (Figure 42).
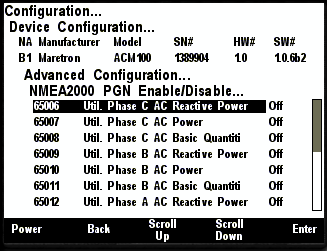
Figure 42 – ACM100 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable the transmission of a PGN message,
or set the frequency of transmission of the message by pressing the Enter key (![]() ) on the
message to be configured. Options are:
) on the
message to be configured. Options are:
· Off – The PGN will not be transmitted
· On – The PGN will be transmitted at its default NMEA2000 rate.
· 0.5s…5s – The PGN will be transmitted at the interval specified.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.3.1.11 Restore Factory Defaults
This option restores all settings on the ACM100 device to their factory default state.
6.3.2 AC Circuit Type
You must configure the ACM100 as to what type of AC circuit connection it is monitoring. The allowable values for this parameter are as follows:
· Single-Phase (Phase A) – use this value when power is connected via a single hot wire and a single neutral wire (a typical 110VAC connection in the US, or 220VAC connection in Europe).
· Single-Phase (Phase A, B) – use this value when power is connected via two hot wires (180° out of phase with each other) and single neutral wire from a single phase of a transformer (a typical 220VAC connection in the US).
· 3-Phase Y (Phase A, B, C) – use this value when power is connected via the three hot wires (120° out of phase with each other) and single neutral wire from a three-phase “Y” connected circuit.
6.3.3 AC Device Type
You must configure the ACM100 as to what type of AC source it is monitoring. The allowable values for this parameter are as follows:
· Generator (default) – use this value when you are monitoring the output of an onboard generator.
· Utility – use this value when you are monitoring shore power.
· Bus – use this value if you are monitoring power flowing across a cable that is not located directly at the output of a generator or a shore power connection (e.g., an AC selection switch might have as an input the shore power and another input from the generator, connecting the ACM100 at the output of the AC selection switch would require the ACM100 to be configured as “Bus”.
6.3.4 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple ACM100s on the network.
6.3.5 Label
A device label may be assigned to the ACM100 as an aid to identifying the device over the network (i.e., Shore Power or Port Generator, etc.). Typically this label will describe the equipment to which the ACM100 is connected. See section 3.3.4 for details on how to enter a textual value.
6.3.6 Reset Total Energy Recorded
The ACM100 will accumulate the total amount of energy produced by a Generator or a Utility. Pressing the Enter key, while this item is highlighted will start the process to reset this value to zero. The following confirmation screen is displayed.
Figure 43 – Reset Total Energy Recorded Confirmation Screen
Press Accept to reset the value, or Cancel to return to the previous screen.
6.4 Maretron ALM100 Configuration
This describes the configuration of the Maretron ALM100 firmware version 1.0.5.
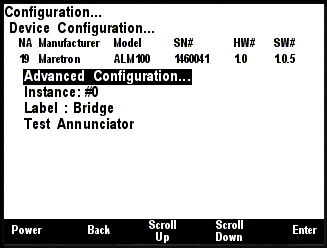
Figure 44 – ALM100 Configuration Screen
6.4.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
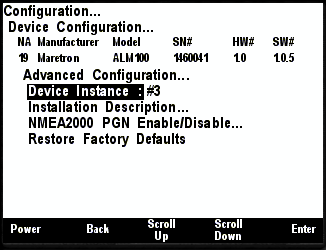
Figure 45 – ALM100 Advanced Configuration Screen
6.4.1.1 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.4.1.2 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See section 3.3.4 for details on how to enter a textual value.
6.4.1.3 NMEA2000 PGN Enable/Disable
The ALM100 Annunciator Module transmits the NMEA2000 PGN #130824 which can be turned on or turned off by the DSM410 display. Pressing the Enter key with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410 to display the following screen (Figure 46).
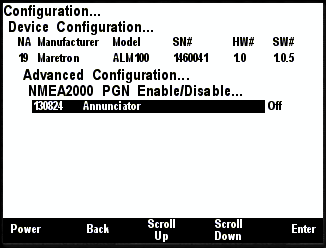
Figure 46 – ALM100 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable the transmission of the Annunciator
message, or set the frequency of transmission of the message by pressing the
Enter key (![]() ) on the message to be configured. Options are:
) on the message to be configured. Options are:
· Disable – The Annunciator message will not be transmitted
· Default – The Annunciator message will be transmitted at its default NMEA2000 rate, and each time the value changes.
· 0.5s...5s – The Annunciator message will be transmitted at the period specified, and each time the value changes.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.4.1.4 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.4.2 Instance
From here the instance number used in the Annunciator message may be set.
6.4.3 Label
A label may be assigned to the ALM100 as an aid to identifying the device over the network. Typically this label will describe the location of the ALM100.
See section 3.3.4 for details on how to enter a textual value.
6.4.4 Test Annunciator
The Annunciator may be tested by scrolling the cursor to highlight this entry and then pressing the Enter button. The ALM100 will emit a single beep.
6.5 Maretron CLM100 Configuration
This describes the configuration of the Maretron CLM100 firmware version 1.0.1.6.
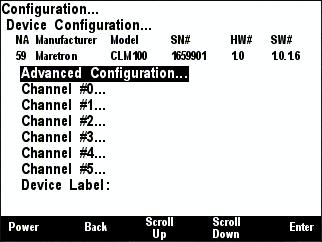
Figure 47 – CLM100 Configuration Screen
6.5.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
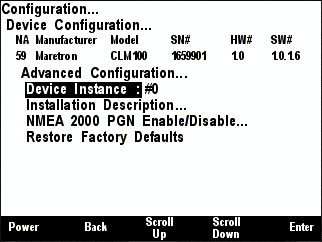
Figure 48 – CLM100 Advanced Configuration Screen
6.5.1.1 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.5.1.2 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See section 3.3.4 for details on how to enter a textual value.
6.5.1.3 NMEA2000 PGN Enable/Disable
The CLM100 Current Loop Monitor can transmit the NMEA2000 PGNs #65286, 127751, 130313, 130314, 130816, and 130840 which can be turned on or turned off by the DSM410 display. Only the PGN's which correspond to the configuration of the channels will be shown in this list. Pressing the Enter key with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410 to display the following screen (Figure 53).
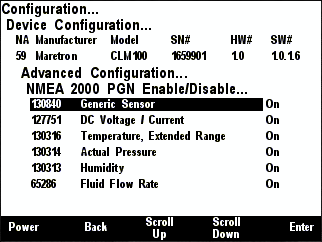
Figure 49 – CLM100 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable the transmission of the these
messages, or set the frequency of transmission of the message by pressing the
Enter key (![]() ) on the message to be configured. Options are:
) on the message to be configured. Options are:
· Disable – The message will not be transmitted
· Default – The message will be transmitted at its default NMEA2000 rate.
· 0.1s...25.0s – The message will be transmitted at the period specified.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.5.1.4 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.5.2 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
6.5.3 Channel Configuration
Individual channels may be configured by using the Scroll Up and Scroll Down buttons to highlight the channel, and then pressing the Enter key. The following screen will be displayed.
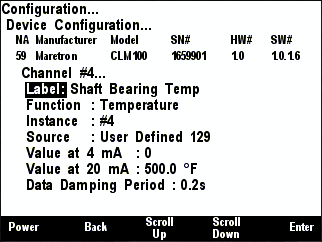
Figure 50 – CLM100 Channel Configuration Screen
6.5.3.1 Label
A label may be assigned to each channel of the CLM100 as an aid to identifying the parameter that is being displayed. Typically this label will describe the function or location of the sensor.
6.5.3.2 Function
The CLM100 can support 4-20mA current loop transducers of many different types. This field allows you to select the type of parameter that is being monitored by this channel. You may select from the following parameter types (please refer to the CLM100 User’s Manual for information on the available units, ranges, and resolutions for each function.
· dB (decibels)
· DC Voltage
· DC Current
· Resistance
· Distance
· Velocity
· Acceleration
· Angle
· Angular Velocity
· Angular Acceleration
· Rotational Rate
· Temperature
· Pressure
· Humidity
· Force
· Flow Rate
· Strain
· Disable – the channel is disabled and transmits no data over the NMEA 2000 network
6.5.3.3 Instance
From here the instance number used in the message send for this channel may be set.
6.5.3.4 Source
This parameter is present only when the channel has been configured for the function of Temperature, Pressure, Humidity, or Flow Rate. This parameter selects the type of temperature, pressure, humidity, or flow rate measurement being performed so that displays can more easily select the data from the network.
6.5.3.5 Value at 4mA
Program this parameter to match the reading of the current loop transducer when it is sourcing a current of 4mA. You can determine this value by examining the specification of the transducer being used.
6.5.3.6 Value at 20mA
Program this parameter to match the reading of the current loop transducer when it is sourcing a current of 20mA. You can determine this value by examining the specification of the transducer being used.
6.5.3.7 Data Damping Period
You can configure a damping parameter to smooth the parametric readings or make them more responsive. The data damping is configurable between 0.1-25.0 seconds. The default data damping period is 3.0 seconds.
6.6 Maretron DCM100 Configuration
This describes the configuration of the Maretron DCM100 firmware version 1.0.4.
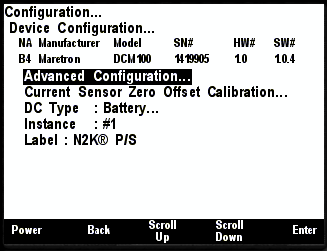
Figure 51 – DCM100 Configuration Screen
6.6.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
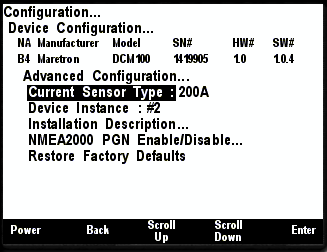
Figure 52 – DCM100 Advanced Configuration Screen
6.6.1.1 Current Sensor Type
Three different current sensors may be attached to the DCM100. Options are:
· 200A – A 200 Amp Current Transducer is connected to the DCM100. This has the part number LEMHTA200-S.
· 400A – A 400 Amp Current Transducer is connected to the DCM100. This has the part number LEMHTA400-S.
· 600A – A 600 Amp Current Transducer is connected to the DCM100. This has the part number LEMHTA600-S.
Select the required transducer using the Scroll Up and Scroll Down keys followed by the Enter key.
6.6.1.2 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.6.1.3 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See section 3.3.4 for details on how to enter a textual value.
6.6.1.4 NMEA2000 PGN Enable/Disable
The DCM100 Annunciator Module transmits the NMEA2000 PGNs #127506 and 127508 which can be turned on or turned off by the DSM410 display. Pressing the Enter key with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410 to display the following screen (Figure 53).
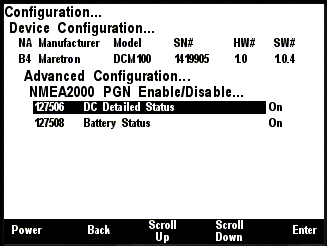
Figure 53 – DCM100 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable the transmission of the these
messages, or set the frequency of transmission of the message by pressing the
Enter key (![]() ) on the message to be configured. Options are:
) on the message to be configured. Options are:
· Disable – The message will not be transmitted
· Default – The message will be transmitted at its default NMEA2000 rate.
· 1.0s...5.0s – The message will be transmitted at the period specified.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.6.1.5 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.6.2 Current Sensor Zero Offset Calibration
The DCM100 is shipped with a Hall-effect current sensor. In order to match the DCM100 unit and the sensor to one another and ensure maximum accuracy, you should perform this calibration step while there is no current flowing through the current sensor. Move the highlight bar to the Current Sensor Zero Offset Calibration and press the Enter button. The following confirmation screen will be displayed:
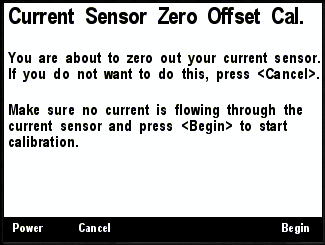
Figure 54 – Current Sensor Zero Offset Calibration Confirmation Screen
Make sure that no current is flowing through the sensor, and press Begin to execute the calibration process or Cancel to return to the previous menu. When the calibration is complete, the following screen will be displayed.
Figure 55 – Current Sensor Zero Offset Calibration Complete Screen
Press the Back button to return to the previous menu.
6.6.3 DC Type
You can configure the DCM100 as to what type of DC power source it is monitoring. With the exception of the “Battery” type, the value of this parameter is used only for reporting the power source type over the NMEA 2000 network. However, if you select the “Battery” type, many battery-related options become available.
The following DC Types are selectable:
· Battery
· Alternator
· Convertor
· Solar Cell
· Wind Generator
If the DC Type is set to battery, then the following options may be entered to characterize the battery and allow the estimation of remaining charge etc.
6.6.3.1 Battery Type
The available battery types are
· Flooded/Wet
· Gel
· AGM
· Other
Selecting one of these types causes the remaining parameters to be set to appropriate default values.
6.6.3.2 Nominal Voltage
You may program here the nominal voltage of the battery, which is used only for reporting over the NMEA 2000 network. Available choices are 6, 12, 24, 32, 36, 42, and 48 Volts.
6.6.3.3 Equalization
You may indicate here whether or not the battery supports equalization. This is used only for reporting over the NMEA 2000 network. Available choices are
· Supported
· Not Supported
6.6.3.4 Temperature Coefficient
The capacity of a battery generally increases with increasing temperature. So that the DCM100 can properly calculate the battery’s state of charge, program this parameter with the increase in battery capacity, in percent, per increase in temperature, in degrees Celsius. The temperature coefficient can be set to a value between 0%/°C – 5%/°C.
6.6.3.5 Peukert Exponent
The Peukert Exponent for the battery can be set to a value between 1.0 and 1.5. Please refer to Section 4.8 on page 11 for details.
6.6.3.6 Charge Efficiency Factor
The Charge Efficiency Factor for the battery can be set to a value between 5% and 100%. Please refer to Section 4.6.1 on page 11 for details.
6.6.3.7 Fully Charged Voltage
In order for the DCM100 to determine when a battery is fully charged, it uses three parameters. The “Fully Charged Voltage” indicates the value voltage at which the battery is considered fully charged if the battery voltage remains above this value and the battery current remains below the “Fully Charged Current” for the amount of time defined by the “Fully Charged Time” parameter.
6.6.3.8 Fully Charged Current
In order for the DCM100 to determine when a battery is fully charged, it uses three parameters. The “Fully Charged Voltage” indicates the value voltage at which the battery is considered fully charged if the battery voltage remains above this value and the battery current remains below the “Fully Charged Current” for the amount of time defined by the “Fully Charged Time” parameter.
6.6.3.9 Fully Charged Time
In order for the DCM100 to determine when a battery is fully charged, it uses three parameters. The “Fully Charged Voltage” indicates the value voltage at which the battery is considered fully charged if the battery voltage remains above this value and the battery current remains below the “Fully Charged Current” for the amount of time defined by the “Fully Charged Time” parameter.
6.6.3.10 Battery Temperature
In order for the DCM100 to properly determine battery capacity and state of charge, it must know the temperature of the battery. If you are using a TR3K temperature sensor attached to the battery, you should set this parameter to “Sensor”. Otherwise, if no temperature sensor is available, you can set this parameter to the estimated battery temperature, between -25°C and 125°C.
6.6.3.11 Time Remaining Floor
The DCM100 calculates the time, given the current being discharged from the battery, before the battery becomes discharged. By default, the DCM100 considers a battery to be discharged when its state of charge reaches the “Time Remaining Floor” value, which is by default set to 50%. If you desire to use some other state of charge value for the “Time Remaining Floor”, you may change this parameter to the desired value.
6.6.3.12 Time Remaining Averaging Period
If loads on the battery are switching on and off frequently, the battery time remaining value calculated by the DCM100 can vary significantly. You may change the time over which current readings are averaged by changing this parameter anywhere in the range of 1 second to 32 minutes.
6.6.3.13 Zero Current Threshold
The current sensor reading can drift slightly at zero current, depending on temperature. Over a long period of time, this can cause the DCM100 to calculate that a battery is discharging slowly, even though it is not. The Zero Current Threshold parameter indicates a reading from the current sensor below which no current is considered to be flowing into or out of the battery.
6.6.4 Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.6.5 Label
A label may be assigned to the DCM100 as an aid to identifying the device over the network. Typically this label will describe the battery or device which the DCM100 is monitoring. See section 3.3.4 for details on how to enter a textual value.
6.7 Maretron DCR100 Configuration
The DSM410 is capable of configuring the Maretron DCR100 DC Relay device. This section describes the configuration of the Maretron DCR100 firmware version 1.1.1. The main DCR100 configuration screen is shown below.
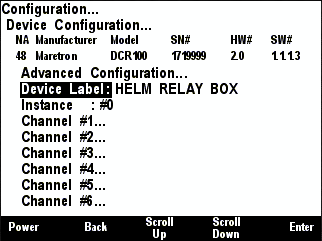
Figure 56 – DCR100 Configuration Screen
6.7.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
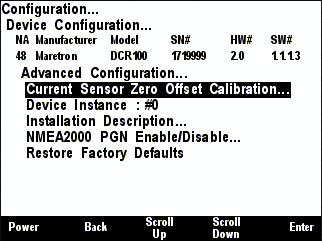
Figure 57 – DCR100 Advanced Configuration Screen
6.7.1.1 Current Sensor Zero Offset Calibration
The DCR100 contains Hall-effect current sensors. In order to ensure maximum accuracy, you should perform this calibration step while there is no current flowing through the current sensors. Move the highlight bar to the Current Sensor Zero Offset Calibration and press the Enter button. The following confirmation screen will be displayed:
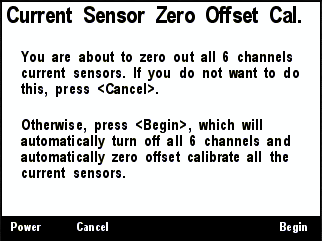
Figure 58 – DCR100 Current Sensor Zero Offset Calibration Screen
Press Begin to execute the calibration process or Cancel to return to the previous menu. During the calibration process, all channels will be turned off. When the calibration is complete, the following screen will be displayed.
Figure 59 – DCR100 Current Sensor Zero Offset Calibration Completion Screen
Press the Back button to return to the previous menu.
6.7.1.2 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0”.
6.7.1.3 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See section 3.3.4 for details on how to enter a textual value.
6.7.1.4 NMEA 2000 PGN Enable/Disable
The DCR100 transmits a variety of the NMEA2000 PGN’s which can be turned on or turned off by the DSM410 display. Pressing the Enter key with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410 to display the following screen (Figure 60).
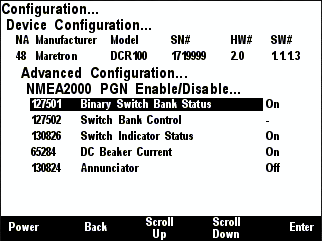
Figure 60 – DCR100 NMEA2000 PGN Enable/Disable Screen
6.7.1.5 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.7.2 Device Label
This entry allows you to assign a text label to the device. This label is visible in Maretron analysis and display products and allows you to easily identify the particular device.
6.7.3 Instance
This field identifies the particular switch bank instance which is transmitted by this DCR100. This instance number is used by display products to select the particular bank of switches to be controlled or monitored.
6.7.4 Channel #1-#6 Configuration
Each channel may be programmed into one of two different operating modes: DCR Mode or ALM Mode.
6.7.4.1 Channel #1-#6 Configuration (DCR Mode)
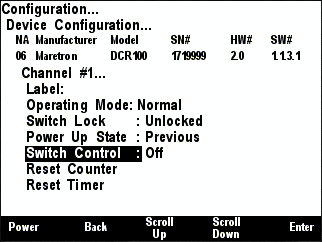
Figure 61 – DCR100 Channel Configuration Screen (DCR Mode)
6.7.4.1.1 Label
This entry allows you to assign a text label to the device. This label is visible in Maretron analysis and display products and allows you to easily identify the particular device.
6.7.4.1.2 Operating Mode
The operating mode of each channel may be set to either DCR (DC Relay), in which case the state of the channel is controlled by “Circuit Breaker / Switch” controls in N2KView or “Switch/Breaker” favorite screens in the DSM150/DSM250/DSM410 displays. This section of the manual assumes the operating mode has been set to “DCR”.
6.7.4.1.3 Switch Lock
The default state of a channel in DCR Switch Lock mode is “Unlocked”. In the Unlocked mode, the channel may be turned on and off from network display devices. By setting the Switch Lock mode of the channel to “Lock”, then channel will not change state until the Switch Lock mode has once again been set to “Unlocked”.
6.7.4.1.4 Power Up State
This entry defines the state of the channel when the DCR100 is powered up. You may set this entry of “Off”, in which the channel powers up in the Off state (the solid-state relay is open). You may also set this entry to “On”, in which the channel powers up in the On state (the solid-state relay is closed). Finally, you may set this entry to “Previous”, in which the channel powers up to the state it was in when power was previously removed.
6.7.4.1.5 Switch Control
This entry will show the current state of the relay channel, either “Off” (open) or “On” closed. You may use this menu entry to turn the relay channel on or off.
6.7.4.1.6 Reset Counter
This resets the hardware counter associated with this channel to zero.
6.7.4.1.7 Reset Timer
This resets the hardware timer associated with this channel to zero.
6.7.4.2 Channel #1-#6 Configuration (ALM Mode)
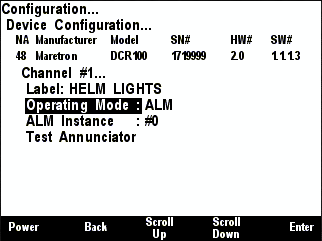
Figure 62 – DCR100 Channel Configuration Screen (ALM Mode)
6.7.4.2.1 Label
This entry allows you to assign a text label to the device. This label is visible in Maretron analysis and display products and allows you to easily identify the particular device.
6.7.4.2.2 Operating Mode
The operating mode of each channel may be set to either DCR (DC Relay), in which case the state of the channel is controlled by “Circuit Breaker / Switch” controls in N2KView or “Switch/Breaker” favorite screens in the DSM150/DSM250/DSM410 displays. This section of the manual assumes the operating mode has been set to “ALM”.
6.7.4.2.3 ALM Instance
This entry allows you to program the instance number for the ALM function. You may use a value between 0 and 15. This instance number is used by the DSM150/DSM250/DSM410 or N2KView when selecting annunciators to sound when programming an alert.
6.7.4.2.4 Test Annunciator
Select this entry to verify functionality of the channel in ALM mode. This will cause the annunciator to sound or light briefly.
6.8 Maretron DSM200 Configuration
You can use the DSM410 to configure other remotely-located DSM200 units by using the Remote DSM200 configuration menu shown in Figure 63 below. This describes the configuration of the Maretron DSM200 firmware version 1.10. There is one configurable item for the remote DSM200 configuration and that is “Remote Device Selection…”.

Figure 63 – DSM200 Remote Configuration Screen
6.8.1 Remote Device Selection
A DSM410 unit can be used to configure a remote DSM200 to set which NMEA 2000® devices are selected for display on the remote DSM200 unit. In this manner, multiple devices of the same type may be used on a NMEA 2000® network in a fail-safe configuration. For example, a certain compass unit out of several may be selected for display on the remote DSM200. The “Remote Device Selection…” menu for an example network configuration can be seen in Figure 64 below.
WARNING: Do not select multiple devices of the same type for display. This will result in multiple and possibly conflicting readings.
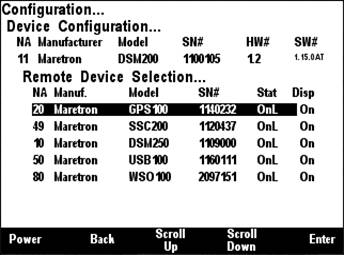
Figure 64 – DSM200 Remote Device Selection Screen
The “NA” column of the menu displays the node address the device is using.
The “Manuf.” column of the menu displays the manufacturer of the device.
The “Model” column displays the model number of the device.
The “SN#” column displays the serial number of the device, so that any of two or more devices of the same manufacturer and model number may be distinguished from one another.
The “Stat” column indicates whether the device is currently connected to the bus and is responding to queries (“Online”), or has been disconnected from the bus, has lost power, or for some other reason is not responding to queries (“Offline”).
The “Disp” column indicates whether data from that
particular device is accepted for display by the remote DSM200 (“On”) or that
the remote DSM200 ignores data transmitted by this device (“Off”). By scrolling
to the device and pressing the Enter key (![]() ), you may then use the Scroll
Up (
), you may then use the Scroll
Up (![]() )
and Scroll Down (
)
and Scroll Down (![]() ) keys to toggle the “Display” status for this particular device. Once
you are satisfied with the state of the “Display” setting, press the Enter key
(
) keys to toggle the “Display” status for this particular device. Once
you are satisfied with the state of the “Display” setting, press the Enter key
(![]() ) to
accept the setting.
) to
accept the setting.
The remote DSM200 will retain information on devices that have been removed from the bus or powered down (“Offline”) so that when they are placed back on the bus, they will assume their prior “Display” setting.
6.9 Maretron DSM150/DSM250/DSM410 Configuration
You can use the DSM410 to configure other remotely-located DSM150, DSM250, and DSM410 units by using the Remote DSM150/DSM250/DSM410 configuration menu as shown in Figure 65 below. This describes the configuration of the Maretron DSM150/DSM250/DSM410 firmware version 1.7.2. There are three configurable items for the remote DSM150/DSM250/DSM410: “Remote Device Selection…”, “Copy device selection from local display”, and “Copy favorite settings from local display”.
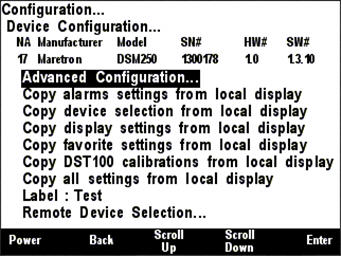
Figure 65 – DSM150/DSM250/DSM410 Remote Configuration Screen
6.9.1 Remote Device Selection
A DSM410 unit can be used to configure a remote DSM150/DSM250/DSM410 to set which NMEA 2000® devices are selected for display on the remote DSM150/DSM250/DSM410 unit. In this manner, multiple devices of the same type may be used on a NMEA 2000® network in a fail-safe configuration. For example, a certain compass unit may be selected from several available compasses for display on the remote DSM150/DSM250/DSM410. The Remote DSM150/DSM250/DSM410 Device Selection Menu for an example network configuration can be seen in Figure 66 below.
WARNING: Do not select multiple devices of the same type for display. This will result in multiple and possibly conflicting readings.
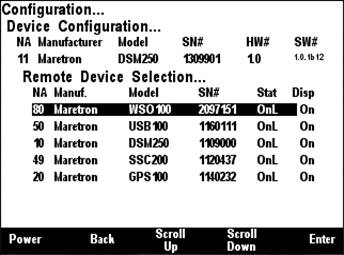
Figure 66 – DSM150/DSM250/DSM410 Remote Device Selection Screen
The “NA” column of the menu displays the node address the device is using.
The “Manuf.” column of the menu displays the manufacturer of the device.
The “Model” column displays the model number of the device.
The “SN#” column displays the serial number of the device, so that any of two or more devices of the same manufacturer and model number may be distinguished from one another.
The “Stat” column indicates whether the device is currently connected to the bus and is responding to queries (“Online”), or has been disconnected from the bus, has lost power, or for some other reason is not responding to queries (“Offline”).
The “Disp” column indicates whether data from that particular
device is accepted for display by the remote DSM150/DSM250/DSM410 (“On”) or
that the remote DSM150/DSM250/DSM410 ignores data transmitted by this device
(“Off”). By scrolling to the device and pressing the Enter key (![]() ),
you may then use the Scroll Up (
),
you may then use the Scroll Up (![]() ) and Scroll Down (
) and Scroll Down (![]() ) keys to
toggle the “Display” status for this particular device. Once you are satisfied
with the state of the “Display” setting, press the Enter key (
) keys to
toggle the “Display” status for this particular device. Once you are satisfied
with the state of the “Display” setting, press the Enter key (![]() ) to accept the
setting.
) to accept the
setting.
The remote DSM150/DSM250/DSM410 will retain information on devices that have been removed from the bus or powered down (“Offline”) so that when they are placed back on the bus, they will assume their prior “Display” setting.
6.9.2 Copy alarms settings from local display
It is possible to copy the alarm settings from a DSM410 unit to a remotely located DSM150/DSM250/DSM410. This should be done with care because if more than one Alert Source is monitoring the same parameter, then multiple alerts will be generated when the parameter goes out of bounds, and each one will need to be independently accepted or cancelled. Any alarms existing on the remote DSM150/DSM250/DSM410 will be deleted. This command will also copy the SMS (Text) Phone Book settings. Figure 67 below shows this menu item highlighted.
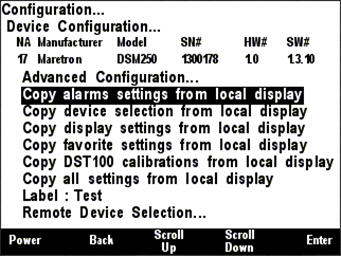
Figure 67 – DSM150/DSM250/DSM410 Copy alarms settings from local display
After you select this menu item and press Enter, the alarm settings from this DSM410 unit will be copied to the selected remote DSM150/DSM250/DSM410 unit.
6.9.3 Copy device selection from local display
Since it is normally desirable for all DSM150/DSM250/DSM410 units on a network to display the same sensors, it is possible to copy the device selection settings from a DSM410 unit to a remotely located DSM150/DSM250/DSM410. In this way, it is possible to make all device selection changes on a single DSM150/DSM250/DSM410 unit and then quickly and conveniently duplicate these new device selection settings on other DSM150/DSM250/DSM410 units attached to the network. Figure 68 below shows this menu item highlighted.
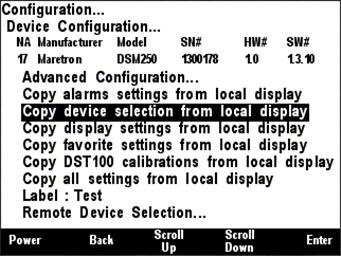
Figure 68 – DSM150/DSM250/DSM410 Copy device selection from local display
After you select this menu item and press Enter, the device selection settings from this DSM410 unit will be copied to the selected remote DSM150/DSM250/DSM410 unit.
6.9.4 Copy display settings from local display
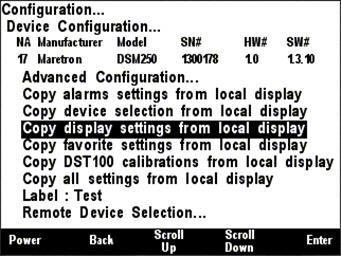
Figure 69 – DSM150/DSM250/DSM410 Copy display settings from local display
6.9.5 Copy favorite settings from local display
It is also possible to copy the favorite screen settings from one DSM410 to a remote DSM150/DSM250/DSM410 unit. This menu item can be seen selected in Figure 70 below.
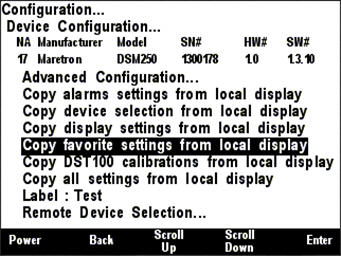
Figure 70 – DSM150/DSM250/DSM410 Copy favorite settings from local display
By selecting this menu item and pressing Enter, all the favorite screen settings will be copied from the local DSM150/DSM250/DSM410 to the selected remote DSM150/DSM250/DSM410 unit. After copying favorite screen settings, it is necessary to restart the remote unit. A screen, which can be seen in Figure 71 below will appear indicating that favorite settings have been successfully transferred to the remote DSM150/DSM250/DSM410 and that the remote DSM150/DSM250/DSM410 must be restarted to complete the operation. Press Enter to restart the remote DSM150/DSM250/DSM410 unit, complete the favorite settings transfer operation, and return to the previous menu selection.
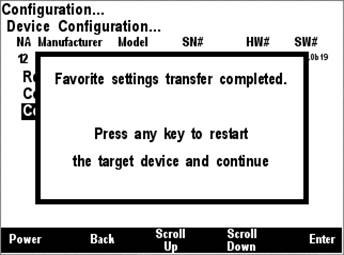
Figure 71 – Favorite Settings Transfer Completion Screen
6.9.6 Copy DST100 calibrations from local display
DST100 calibration data is not stored in the DST100 device. Rather each DSM150/DSM250/DSM410 needs to apply its own set of calibration parameters to the raw data received. This operation allows one DSM410 to copy its calibration table to a second DSM150/DSM250/DSM410.
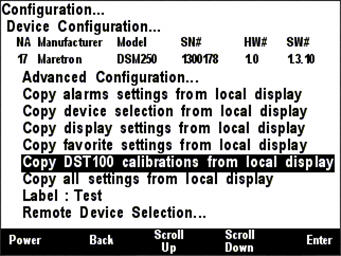
Figure 72 – DSM150/DSM250/DSM410 Copy DST100 calibrations from local display
6.9.7 Copy all settings from local display
This is the single operation that makes it easy to have multiple DSM150/DSM250/DSM410 displays on a boat. Set one DSM150/DSM250/DSM410 up so that all its settings are correct, and quickly transfer all the alarms, device settings and display setting to another DSM150/DSM250/DSM410. Then go in and update the following information to customize the new device.
· Display Settings à Advanced Configuration à Installation Descriptions
· Display Settings à Label
Also use this function to copy settings from an old DSM150/DSM250/DSM410 to a new DSM150/DSM250/DSM410 when replacing the device.
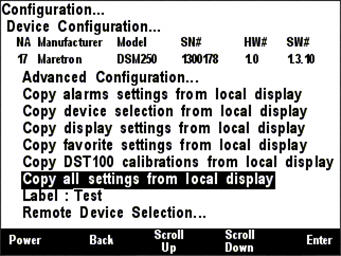
Figure 73 – DSM150/DSM250/DSM410all settings from local display
6.9.8 Label
The Label of the DSM150/DSM250/DSM410 is used by the Alert System to identify the source of an alert. Here, the label can be changed using the method described in section 3.3.4.
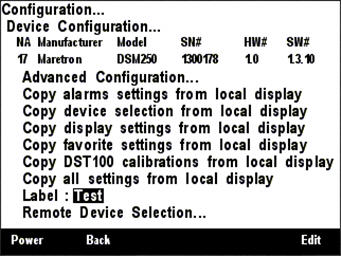
Figure 74 – DSM150/DSM250/DSM410 Label Configuration
6.9.9 Remote Device Selection
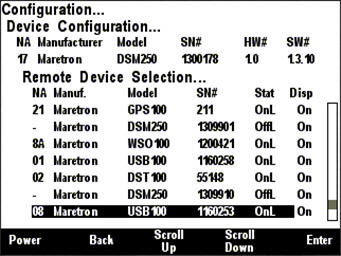
Figure 75 – DSM150/DSM250/DSM410 Remote Device Selection
6.10 Maretron DST100 Configuration
The DSM410 is capable of configuring Maretron’s DST100 for several different parameters including trip log resetting, transducer depth offset, and speed calibration. This describes the configuration of the Maretron DST100 firmware version 1.0.1.
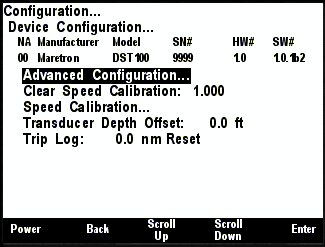
Figure 76 – DST100 Configuration Screen
6.10.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
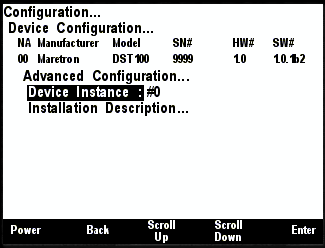
Figure 77 – DST100 Advanced Configuration Screen
6.10.1.1 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.10.1.2 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See section 3.3.4 for details on how to enter a textual value.
6.10.2 Clear Speed Calibration
The Clear Speed Calibration configuration parameter
shows you the currently used correction factor. All STW readings for the
particular DST100 (indicated by the SN#) are multiplied by this number to
arrive at the displayed number. You can remove the correction factor by
pressing the Enter key (![]() ) with the “Clear Speed
Calibration:” menu item selected. And then choose “Clear” using Scroll Up (
) with the “Clear Speed
Calibration:” menu item selected. And then choose “Clear” using Scroll Up (![]() ) or Scroll
Down (
) or Scroll
Down (![]() )
keys followed by the Enter key (
)
keys followed by the Enter key (![]() ). This changes the correction
factor back to 1 such that all subsequent STW readings are no longer adjusted
before displaying by the DSM410.
). This changes the correction
factor back to 1 such that all subsequent STW readings are no longer adjusted
before displaying by the DSM410.
6.10.3 Speed Calibration
The DST100 speed through water (STW) initial accuracy is
significantly affected by the location or placement of the DST100 within the
hull. The DSM410 can correct for these inaccuracies using the speed calibration
procedure. You calibrate the DSM410 for the DST100 STW by pressing the Enter
key (![]() )
with the “Speed Calibration…” menu item selected which results in the screen
shown in Figure 78.
)
with the “Speed Calibration…” menu item selected which results in the screen
shown in Figure 78.
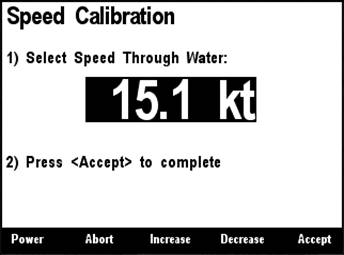
Figure 78 – Calibrating the DSM410 for DST100 Speed through Water
The speed calibration screen shown in Figure 78 indicates
the STW as measured by the DST100, which can be changed to the actual STW by
following these steps. First, pick a speed where you are most concerned with
the best accuracy. Next, bring the boat up to the desired speed using some
other source, perhaps the GPS speed over ground (SOG). Remember that the SOG
does not necessary reflect the STW because of currents, and drift due to winds,
so you should do this in an area where you are sure there are no currents and
calm winds. Finally, use the Increase (![]() ) and Decrease (
) and Decrease (![]() ) keys to adjust the
display value until it matches the known speed of the boat. Press the Accept (
) keys to adjust the
display value until it matches the known speed of the boat. Press the Accept (![]() ) key to
accept the value when you are satisfied. If you do not wish to perform
installation offset calibration at this time, press the Abort (
) key to
accept the value when you are satisfied. If you do not wish to perform
installation offset calibration at this time, press the Abort (![]() ) key and the speed
calibration will not be altered. The speed calibration process provides a
method for the actual STW reading produced by the DST100 to be adjusted within
the DSM410 (i.e., calibration data is not stored within the DST100).
) key and the speed
calibration will not be altered. The speed calibration process provides a
method for the actual STW reading produced by the DST100 to be adjusted within
the DSM410 (i.e., calibration data is not stored within the DST100).
WARNING: Unlike resetting the trip log and setting the depth offset, which actually programs the DST100 so that all displays receive the same information, speed calibration must be performed at individual displays in order to show calibrated speed through water.
6.10.4 Transducer Depth Offset
The DSM410 can set the transducer depth offset parameter in a DST100 depth/speed/temperature transducer. If you are interested in the actual water depth (as opposed to the depth beneath the keel), then you should program a positive value equal to the distance from the waterline to the depth of the DST100. The DSM410 will then add the measured depth of the water (as seen by the DST100) to the programmed offset value to produce the total water depth. If you are interested in the depth of water beneath the keel, then you should program a negative value equal to the distance between the DST100 and the bottom of the keel. The display will then subtract the programmed offset from the measured depth of the water (as seen by the DST100) showing you the depth of water beneath the keel.
You program the transducer depth offset by pressing the Enter
key (![]() )
with the “Transducer Depth Offset:” menu item selected which results in the
screen shown in Figure 79.
)
with the “Transducer Depth Offset:” menu item selected which results in the
screen shown in Figure 79.
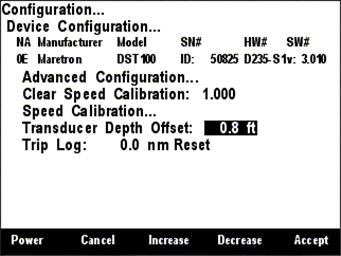
Figure 79 – Setting the Transducer Depth Offset in a DST100
With the offset value highlighted, you can change the offset
by using the Increase and Decrease keys (![]() or
or ![]() ).
Once you have selected the desired offset, push the Enter key (
).
Once you have selected the desired offset, push the Enter key (![]() ) to complete
the transducer depth offset calibration. This procedure actually programs the
offset value into the DST100 such that all displays subsequently receive the
offset information. This means you don’t have to program multiple displays each
with the corresponding offset information as the information is stored at a
single place (at the source).
) to complete
the transducer depth offset calibration. This procedure actually programs the
offset value into the DST100 such that all displays subsequently receive the
offset information. This means you don’t have to program multiple displays each
with the corresponding offset information as the information is stored at a
single place (at the source).
6.10.5 Trip Log
The DSM410 is capable of clearing the trip log counter
within a DST100 depth/speed/temperature transducer. You zero the trip log by
pressing the Enter key (![]() ) with the “Trip Log:” menu item
selected which results in the screen shown in Figure 80. Pressing the Accept
(
) with the “Trip Log:” menu item
selected which results in the screen shown in Figure 80. Pressing the Accept
(![]() ) key
while the “Reset” menu item is selected will complete the operation. Resetting
the trip log zeroes the DST100’s trip log such that all displays receive a zeroed
value (i.e., you don’t have to perform the operation from other display
locations).
) key
while the “Reset” menu item is selected will complete the operation. Resetting
the trip log zeroes the DST100’s trip log such that all displays receive a zeroed
value (i.e., you don’t have to perform the operation from other display
locations).
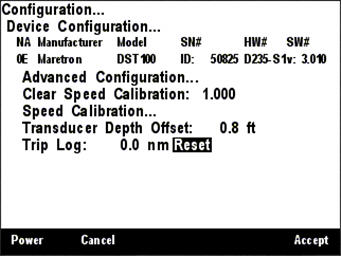
Figure 80 – Resetting the DST100 Trip Distance Log
6.11 Maretron DST110 Configuration
The DSM410 is capable of configuring Maretron’s DST110 for several different parameters including trip log resetting, transducer depth offset, temperature calibration, and speed calibration.
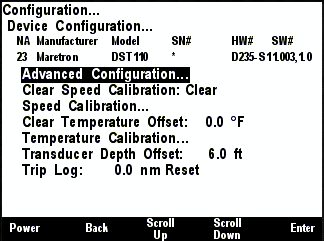
Figure 81 – DST110 Configuration Screen
6.11.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
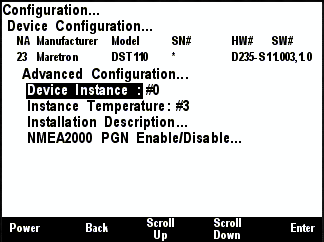
Figure 82 – DST110 Advanced Configuration Screen
6.11.1.1 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.11.1.2 Instance Temperature
The Data Instance of the Temperature (as sent in PGNs 130310, 130311, and 130312) is set in this field. Use the Increase and Decrease buttons to select the correct instance number, and the press the Enter button to store it.
6.11.1.3 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See section 3.3.4 for details on how to enter a textual value.
6.11.1.4 NMEA2000 PGN Enable/Disable
The DST110 transmits several different NMEA2000 PGN’s which can be turned on or turned off by the DSM410 display. Pressing the Enter key with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410 to display the following screen.
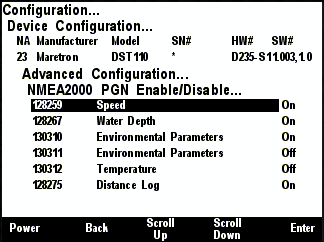
Figure 83 – DST110 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable the transmission of these
messages, or set the frequency of transmission of the message by pressing the
Enter key (![]() ) on the message to be configured. Options are:
) on the message to be configured. Options are:
- Off – The message will not be transmitted
- On – The message will be transmitted at its default NMEA 2000® rate.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.11.2 Clear Speed Calibration
The Clear Speed Calibration configuration parameter
shows you the currently used correction factor. All measured STW readings are
multiplied by this number before being transmitted over the NMEA 2000®
network. You can remove the correction factor by pressing the Enter key (![]() ) with the
“Clear Speed Calibration:” menu item selected. And then choose “Clear” using
Scroll Up (
) with the
“Clear Speed Calibration:” menu item selected. And then choose “Clear” using
Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys followed by the Enter key
(
) keys followed by the Enter key
(![]() ). This
changes the correction factor back to 1 such that all subsequent measured STW
readings are no longer adjusted before begin transmitted over the NMEA 2000®
network.
). This
changes the correction factor back to 1 such that all subsequent measured STW
readings are no longer adjusted before begin transmitted over the NMEA 2000®
network.
6.11.3 Speed Calibration
The DST110 speed through water (STW) initial accuracy is
significantly affected by the location or placement of the DST110 within the
hull. The DST110 can be corrected for these inaccuracies using the speed
calibration procedure. You calibrate the DST110 STW by pressing the Enter
key (![]() )
with the “Speed Calibration…” menu item selected which results in the screen
shown in Figure 78.
)
with the “Speed Calibration…” menu item selected which results in the screen
shown in Figure 78.
Figure 84 – Calibrating the DST110 Speed
The speed calibration screen shown in Figure 78 indicates
the STW as measured by the DST110, which can be changed to the transmitted STW
by following these steps. First, pick a speed where you are most concerned with
the best accuracy. Next, bring the boat up to the desired speed using some
other source, perhaps the GPS speed over ground (SOG). Remember that the SOG
does not necessary reflect the STW because of currents, and drift due to winds,
so you should do this in an area where you are sure there are no currents and
calm winds. Finally, use the Increase (![]() ) and Decrease (
) and Decrease (![]() ) keys to adjust the
display value until it matches the known speed of the boat. Press the Accept (
) keys to adjust the
display value until it matches the known speed of the boat. Press the Accept (![]() ) key to
accept the value when you are satisfied. If you do not wish to perform speed
calibration at this time, press the Abort (
) key to
accept the value when you are satisfied. If you do not wish to perform speed
calibration at this time, press the Abort (![]() ) key and the speed calibration
will not be altered.
) key and the speed calibration
will not be altered.
6.11.4 Clear Temperature Offset
The Clear Temperature Offset configuration parameter
shows you the currently used temperature correction offset. All measured sea
temperature readings have this value added to them before being transmitted
over the NMEA 2000® network. You can set the correction offset to
zero by pressing the Enter key (![]() ) with the “Clear Speed
Calibration:” menu item selected. And then choose “Clear” using Scroll Up (
) with the “Clear Speed
Calibration:” menu item selected. And then choose “Clear” using Scroll Up (![]() ) or Scroll
Down (
) or Scroll
Down (![]() ) keys followed by the Enter key
(
) keys followed by the Enter key
(![]() ). This changes the correction
factor back to 0 such that all subsequent measured sea temperature readings are
no longer adjusted before begin transmitted over the NMEA 2000®
network.
). This changes the correction
factor back to 0 such that all subsequent measured sea temperature readings are
no longer adjusted before begin transmitted over the NMEA 2000®
network.
6.11.5 Temperature Calibration
The temperature calibration screen shown below indicates the
sea temperature as measured by the DST110, which can be changed to the actual
sea temperature by following these steps. Use the Increase (![]() ) and
Decrease (
) and
Decrease (![]() ) keys to adjust the display value until it matches the known sea temperature.
Press the Accept (
) keys to adjust the display value until it matches the known sea temperature.
Press the Accept (![]() ) key to accept the value when
you are satisfied. If you do not wish to perform temperature calibration at
this time, press the Abort (
) key to accept the value when
you are satisfied. If you do not wish to perform temperature calibration at
this time, press the Abort (![]() ) key and the temperature
calibration will not be altered.
) key and the temperature
calibration will not be altered.
Figure 85 - DST110 Water Temperature Calibration Screen
6.11.6 Transducer Depth Offset
The DSM410 can set the transducer depth offset parameter in a DST110 depth/speed/temperature transducer. If you are interested in the actual water depth (as opposed to the depth beneath the keel), then you should program a positive value equal to the distance from the waterline to the depth of the DST110. The DSM410 will then add the measured depth of the water (as seen by the DST110) to the programmed offset value to produce the total water depth. If you are interested in the depth of water beneath the keel, then you should program a negative value equal to the distance between the DST110 and the bottom of the keel. The display will then subtract the programmed offset from the measured depth of the water (as seen by the DST110) showing you the depth of water beneath the keel.
You program the transducer depth offset by pressing the Enter
key (![]() ) with the “Transducer Depth
Offset:” menu item selected which results in the screen shown in Figure 79.
) with the “Transducer Depth
Offset:” menu item selected which results in the screen shown in Figure 79.
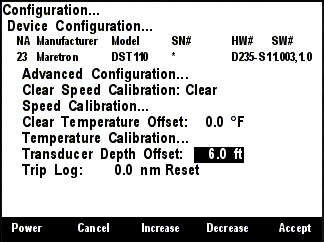
Figure 86 – Setting the Transducer Depth Offset in a DST110
With the offset value highlighted, you can change the offset
by using the Increase and Decrease keys (![]() or
or ![]() ).
Once you have selected the desired offset, push the Enter key (
).
Once you have selected the desired offset, push the Enter key (![]() ) to complete the transducer depth offset calibration. This procedure
actually programs the offset value into the DST110 such that all displays
subsequently receive the offset information. This means you don’t have to
program multiple displays each with the corresponding offset information as the
information is stored at a single place (at the source).
) to complete the transducer depth offset calibration. This procedure
actually programs the offset value into the DST110 such that all displays
subsequently receive the offset information. This means you don’t have to
program multiple displays each with the corresponding offset information as the
information is stored at a single place (at the source).
6.11.7 Trip Log
The DSM410 is capable of clearing the trip log counter
within a DST110 depth/speed/temperature transducer. You zero the trip log by
pressing the Enter key (![]() ) with the “Trip Log:” menu item
selected which results in the screen shown in Figure 80. Pressing the Accept
(
) with the “Trip Log:” menu item
selected which results in the screen shown in Figure 80. Pressing the Accept
(![]() ) key
while the “Reset” menu item is selected will complete the operation. Resetting
the trip log zeroes the DST110’s trip log such that all displays receive a zeroed
value (i.e., you don’t have to perform the operation from other display
locations).
) key
while the “Reset” menu item is selected will complete the operation. Resetting
the trip log zeroes the DST110’s trip log such that all displays receive a zeroed
value (i.e., you don’t have to perform the operation from other display
locations).
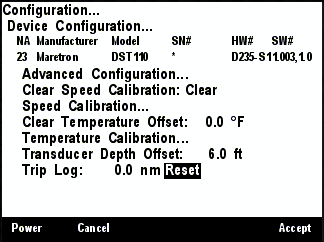
Figure 87 – Resetting the DST110 Trip Distance Log
6.12 Maretron EMS100 Configuration
This describes the configuration of the Maretron EMS100 firmware version 1.4.1.
The EMS100 is configured to match the engine to which it is connected. The EMS100 Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
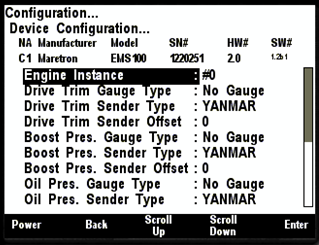
Figure 88 – EMS100 Configuration Screen (First Screen)

Figure 89 – EMS100 Configuration Screen (Second Screen)
6.12.1 Engine Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple engines on the network. By convention, the Port Engine is given an instance number of #0, and the Starboard Engine an instance number of #1. If there is a third center engine, it should be given an instance number of #2.
6.12.2 Boost Pressure Gauge Type
The EMS100 comes from the factory preprogrammed with the characteristics of boost pressure gauge types for supported engines. If the EMS100 is used with an analog boost pressure gauge, you must select the correct type of gauge for this setting in order for the data to be displayed correctly. Valid options are:
· No Gauge – select this option if there is no boost pressure gauge present.
· YANMAR
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.12.3 Boost Pressure Sender Type
The EMS100 comes from the factory preprogrammed with the characteristics of boost pressure senders for supported engines. If the engine to which you are connecting the EMS100 has a boost pressure sender, you must select the correct type of boost pressure sender for this setting in order for the data to be displayed correctly. Valid options are:
· Disabled – select this option if there is no boost pressure sender present.
· YANMAR
- YANMAR W/THRESHOLD
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.12.4 Boost Pressure Sender Offset
Often, the characteristics of individual boost pressure senders vary from their specified values. This setting allows you to apply an offset to the resistance value of the boost pressure sender in order to allow you to bring the digital value reported by the EMS100 into agreement with that displayed by the analog gauge.
6.12.5 Drive Trim Gauge Type
The EMS100 comes from the factory preprogrammed with the characteristics of drive trim gauge types for supported engines. If the EMS100 is used with an analog drive trim gauge, you must select the correct type of gauge for this setting in order for the data to be displayed correctly. Valid options are:
· No Gauge – select this option if there is no trim gauge present.
· YANMAR
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.12.6 Drive Trim Sender Type
The EMS100 comes from the factory preprogrammed with the characteristics of drive trim senders for supported engines. If the engine to which you are connecting the EMS100 has a drive trim sender, you must select the correct type of drive trim sender for this setting in order for the data to be displayed correctly. Valid options are:
· Disabled – select this option if there is no drive trim sender present.
· YANMAR
· MERCURY
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.12.7 Drive Trim Sender Offset
Often, the characteristics of individual drive trim senders vary from their specified values. This setting allows you to apply an offset to the resistance value of the drive trim sender in order to allow you to bring the digital value reported by the EMS100 into agreement with that displayed by the analog gauge. Valid options are:
· -100…100 – number of ohms of resistance to add to the sender reading
Select the required option using the Increase and Decrease keys followed by the Enter key.
6.12.8 Oil Pressure Gauge Type
The EMS100 comes from the factory preprogrammed with the characteristics of oil pressure gauge types for supported engines. If the EMS100 is used with an analog oil pressure gauge, you must select the correct type of gauge for this setting in order for the data to be displayed correctly. Valid options are:
· No Gauge – select this option if there is no oil pressure gauge present.
· YANMAR
· YANMAR W/THRESHOLD
· YANMAR / VDO
· YANMAR/VDO W/THRESHOLD
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.12.9 Oil Pressure Sender Type
The EMS100 comes from the factory preprogrammed with the characteristics of oil pressure senders for supported engines. If the engine to which you are connecting the EMS100 has an oil pressure sender, you must select the correct type of oil pressure sender for this setting in order for the data to be displayed correctly. Valid options are:
· Disabled – select this option if there is no oil pressure sender present.
· YANMAR
· YANMAR / VDO
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.12.10 Oil Pressure Sender Offset
Often, the characteristics of individual oil pressure senders vary from their specified values. This setting allows you to apply an offset to the resistance value of the oil pressure sender in order to allow you to bring the digital value reported by the EMS100 into agreement with that displayed by the analog gauge. Valid options are:
· -100…100 – number of ohms of resistance to add to the sender reading
Select the required option using the Increase and Decrease keys followed by the Enter key.
6.12.11 Water Temperature Gauge Type
The EMS100 comes from the factory preprogrammed with the characteristics of water temperature gauge types for supported engines. If the EMS100 is used with an analog water temperature gauge, you must select the correct type of gauge for this setting in order for the data to be displayed correctly. Valid options are:
· No Gauge – select this option if there is no water temperature gauge present.
· YANMAR
· YANMAR / VDO
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.12.12 Water Temperature Sender Type
The EMS100 comes from the factory preprogrammed with the characteristics of water temperature senders for supported engines. If the engine to which you are connecting the EMS100 has a water temperature sender, you must select the correct type of water temperature sender for this setting in order for the data to be displayed correctly. Valid options are:
· Disabled – select this option if there is no water temperature sender present.
· YANMAR
· YANMAR / VDO
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.12.13 Water Temperature Sender Offset
Often, the characteristics of individual water temperature senders vary from their specified values. This setting allows you to apply an offset to the resistance value of the water temperature sender in order to allow you to bring the digital value reported by the EMS100 into agreement with that displayed by the analog gauge. Valid options are:
· -100…100 – number of ohms of resistance to add to the sender reading
Select the required option using the Increase and Decrease keys followed by the Enter key.
6.12.14 Preset Engine Hours
The EMS100 reports engine hours based on how long the EMS100 has been powered from the engine. The EMS100 comes from the factory preprogrammed with an engine hours reading of 0 hours. If you are installing the EMS100 on an engine that has been in service, or if you have overhauled an engine, you can use this setting to preset the engine hours reading to the desired value. Valid options are:
· 0…99999 – hours
Select the required option using the Increase and Decrease keys followed by the Enter key.
6.12.15 Tachometer Flywheel Teeth
The EMS100 needs to know the number of flywheel teeth on the engine (or the number of alternator pulses per revolution) in order to correctly calculate engine RPM. Use this setting to program the EMS100 with the number of flywheel teeth or alternator pulses per revolution for the engine to which the EMS100 is connected. Valid options are:
· 0…400 – pulses per revolution
Select the required option using the Increase and Decrease keys followed by the Enter key.
6.13 Maretron FFM100 Configuration
The DSM410 is capable of configuring the Maretron FFM100 Fluid Flow Monitor. This describes the configuration of the Maretron FFM100 firmware version 1.1.2.
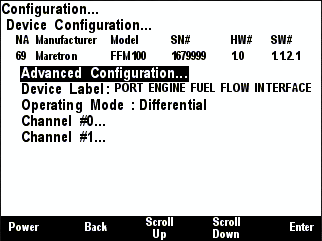
Figure 90 – FFM100 Configuration Screen
6.13.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
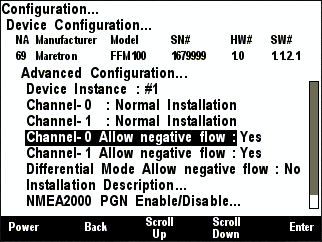
Figure 91 – FFM100 Advanced Configuration
6.13.1.1 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.13.1.2 Channel 0 Installation
Leave this entry at the default value of “Normal Installation” if the flow sensor connected to Channel 0 of the FFM100 is installed such that the direction of the fuel flow is in the same direction as the arrow on the fuel flow sensor label. Change this entry to “Reverse Installation if the direction of the fuel flow is in the opposite direction as the arrow on the fuel flow sensor label.
6.13.1.3 Channel 1 Installation
Leave this entry at the default value of “Normal Installation” if the flow sensor connected to Channel 1 of the FFM100 is installed such that the direction of the fuel flow is in the same direction as the arrow on the fuel flow sensor label. Change this entry to “Reverse Installation if the direction of the fuel flow is in the opposite direction as the arrow on the fuel flow sensor label.
6.13.1.4 Channel 0 Allow negative flow
Leave this entry at the default value of “Yes” for the FFM100 to output negative fuel flow values if the direction of fuel flow for the Channel 0 sensor is opposite the direction of the arrow on the fuel flow sensor label. Set this entry to “No” to output zero for the fuel flow rate if the direction of fuel flow is opposite the direction of the arrow on the fuel flow sensor label.
6.13.1.5 Channel 1 Allow negative flow
Leave this entry at the default value of “Yes” for the FFM100 to output negative fuel flow values if the direction of fuel flow for the Channel 0 sensor is opposite the direction of the arrow on the fuel flow sensor label. Set this entry to “No” to output zero for the fuel flow rate if the direction of fuel flow is opposite the direction of the arrow on the fuel flow sensor label.
6.13.1.6 Differential Mode Allow negative flow
Leave this entry at the default value of “No” for the FFM100 to output zero for the fuel flow rate if the computed net fuel flow rate is negative. Set this entry to “Yes” for the FFM100 to output negative values for the fuel flow rate if the computed net fuel flow rate is negative
6.13.1.7 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later.
6.13.1.8 NMEA2000 PGN Enable/Disable
The FFM100 Fuel Flow Module transmits a number of the NMEA2000® PGNs which can be turned on or turned off by the DSM410 display. Pressing the Enter key with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410 to display the following screen (Figure 92).
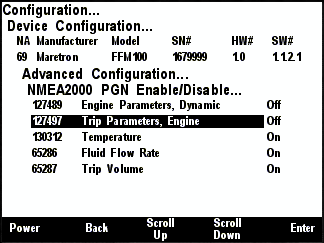
Figure 92 – FFM100 NMEA PGN Enable/Disable Screen
You can enable or disable the transmission of a PGN message,
or set the frequency of transmission of the message by pressing the Enter key (![]() ) on the
message to be configured. Options are:
) on the
message to be configured. Options are:
Off – The PGN will not be transmitted
On – The PGN will be transmitted at its default NMEA2000 rate.
0.5s…5s – The PGN will be transmitted at the interval specified.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.13.1.9 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.13.2 Device Label
A label may be assigned to the FFM100 as an aid to identifying the device over the network. Typically this label will describe the location of the FFM100.
6.13.3 Operating Mode
The FFM100 can operate in one of two user-selectable operating modes:
Differential – this mode is used for diesel engines that recirculate unused fuel back into the fuel take. These engines will have separate supply and return fuel lines.
Two Independent Sensors – the FFM100 can measure flow rates from two independent sources; for example, a water flow rate on one channel and a gasoline fuel flow rate on another channel.
6.13.4 Channel #0…
This submenu contains configuration parameters for Channel #0. This menu looks different depending on whether the FFM100’s operating mode has been set to “Differential” or “Two Independent Sensors”.
6.13.4.1 Channel #0 (Differential Mode)
This section describes the Channel #0 configuration parameters when the FFM100’s operating mode has been set to “Differential”. The Channel #0 (Differential Mode) menu is too large to fit on a single screen, so it is shown in two separate screenshots below.
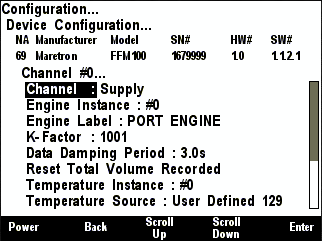
Figure 93 – FFM100 Channel #0 First Configuration Screen (Differential Mode)
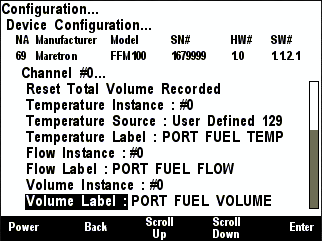
Figure 94 – FFM100 Channel #0 Second Configuration Screen (Differential Mode)
6.13.4.1.1 Channel Supply/Return
You may select whether the Channel #0 fuel flow sensor is connected to the supply fuel line or the return fuel line.
6.13.4.1.2 Engine Instance
Program this parameter to match the desired engine instance number of the flow rate and total fuel used for this channel. You can program this parameter to any value between 0 and 252.
6.13.4.1.3 Engine Label
Each channel has a text label you can set to identify the load controlled by that channel (for example, “PORT ENGINE” or “COOLING WATER FLOW”). For each channel, set this to a value which describes the flow being monitored so that you can easily identify it in display devices.
6.13.4.1.4 K-Factor
Program this parameter to match the K-factor that appears on the flow sensor connected to this channel.
6.13.4.1.5 Data Damping Period
You can configure a damping parameter to smooth the flow rate readings or make them more responsive. The data damping is configurable between 0.2-25.0 seconds. The default data damping period is 3.0 seconds.
6.13.4.1.6 Reset Total Volume Recorded
The FFM100 maintains the total volume recorded in EEPROM, so that it is maintained across power cycles. Select this menu entry to reset the total volume recorded to zero.
6.13.4.1.7 Temperature Instance
Program this parameter to match the desired instance number of the temperature reading for this channel. You can program this parameter to any value between 0 and 252. The default value for this parameter is 0.
6.13.4.1.8 Temperature Source
Program this parameter to match the desired source type of the temperature reading for this channel. The default value for this parameter is 129 (User Defined).
6.13.4.1.9 Temperature Label
Program this parameter with a text string which identifies the particular temperature parameter being monitored by this channel. Maretron display products will display this label text when you are selecting data to display.
6.13.4.1.10 Flow Instance
Program this parameter to match the desired instance number of the fluid flow reading for this channel. You can program this parameter to any value between 0 and 252. The default value for this parameter is 0.
6.13.4.1.11 Flow Label
Program this parameter with a text string which identifies the particular fluid flow parameter being monitored by this channel. Maretron display products will display this label text when you are selecting data to display.
6.13.4.1.12 Volume Instance
Program this parameter to match the desired instance number of the volume reading for this channel. You can program this parameter to any value between 0 and 252. The default value for this parameter is 0.
6.13.4.1.13 Volume Label
Program this parameter with a text string which identifies the particular volume parameter being monitored by this channel. Maretron display products will display this label text when you are selecting data to display.
6.13.4.2 Channel #0 Configuration Menu (Two Independent Sensors Mode)
This section describes the Channel #0 configuration parameters when the FFM100’s operating mode has been set to “Two Independent Sensors”. The Channel #0 (Two Independent Sensors Mode) menu is too large to fit on a single screen, so it is shown in two separate screenshots below.
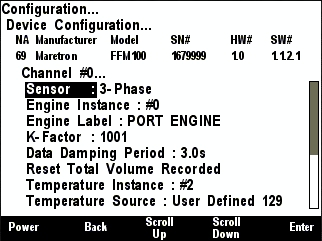
Figure 95 – FFM100 Channel #0 First Configuration Screen (Two Independent Sensors Mode)
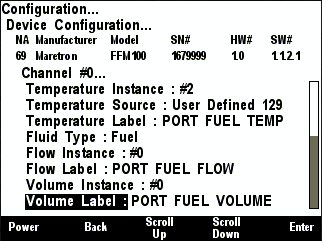
Figure 96 – FFM100 Channel #0 Second Configuration Screen (Two Independent Sensors Mode)
6.13.4.2.1 Sensor
You may select whether this channel is connected to a “3-phase” sensor (Maretron fuel flow sensors with three pulse outputs), or a “1-phase” sensor (other manufacturer’s fluid flow sensors with a single pulse output).
6.13.4.2.2 Engine Instance
Program this parameter to match the desired engine instance number of the flow rate and total fuel used for this channel. You can program this parameter to any value between 0 and 252.
NOTE: If the operating mode is set to “Differential Flow Rate”, then this parameter is unavailable for Channel #0.
6.13.4.2.3 Engine Label
Each channel has a text label you can set to identify the load controlled by that channel (for example, “PORT ENGINE” or “COOLING WATER FLOW”). For each channel, set this to a value which describes the flow being monitored so that you can easily identify it in display devices.
6.13.4.2.4 K-Factor
Program this parameter to match the K-factor that appears on the flow sensor connected to this channel.
6.13.4.2.5 Data Damping Period
You can configure a damping parameter to smooth the flow rate readings or make them more responsive. The data damping is configurable between 0.2-25.0 seconds. The default data damping period is 3.0 seconds.
6.13.4.2.6 Reset Total Volume Recorded
The FFM100 maintains the total volume recorded in EEPROM, so that it is maintained across power cycles. Select this menu entry to reset the total volume recorded to zero.
6.13.4.2.7 Temperature Instance
Program this parameter to match the desired instance number of the temperature reading for this channel. You can program this parameter to any value between 0 and 252. The default value for this parameter is 0.
6.13.4.2.8 Temperature Source
Program this parameter to match the desired source type of the temperature reading for this channel. The default value for this parameter is 129 (User Defined).
6.13.4.2.9 Temperature Label
Program this parameter with a text string which identifies the particular temperature parameter being monitored by this channel. Maretron display products will display this label text when you are selecting data to display.
6.13.4.2.10 Fluid Type
Program this parameter to match the type of fluid whose flow is being monitored.
6.13.4.2.11 Flow Instance
Program this parameter to match the desired instance number of the fluid flow reading for this channel. You can program this parameter to any value between 0 and 252. The default value for this parameter is 0.
6.13.4.2.12 Flow Label
Program this parameter with a text string which identifies the particular fluid flow parameter being monitored by this channel. Maretron display products will display this label text when you are selecting data to display.
6.13.4.2.13 Volume Instance
Program this parameter to match the desired instance number of the volume reading for this channel. You can program this parameter to any value between 0 and 252. The default value for this parameter is 0.
6.13.4.2.14 Volume Label
Program this parameter with a text string which identifies the particular volume parameter being monitored by this channel. Maretron display products will display this label text when you are selecting data to display.
6.13.5 Channel #1…
This submenu contains configuration parameters for Channel #1. This menu looks different depending on whether the FFM100’s operating mode has been set to “Differential” or “Two Independent Sensors”.
1.1.1.1 Channel #1 (Differential Mode)
This section describes the Channel #1 configuration parameters when the FFM100’s operating mode has been set to “Differential”.
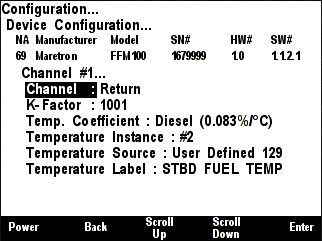
Figure 97 – FFM100 Channel #1 Configuration Screen (Differential Mode)
6.13.5.1.1 Channel Supply/Return
If the Operating Mode is set to Differential, you may select whether the Channel #1 fuel flow sensor is connected to the supply or the return fuel line.
6.13.5.1.2 K-Factor
Program this parameter to match the K-factor that appears on the flow sensor connected to this channel.
6.13.5.1.3 Temp. Coefficient
Program this entry with the coefficient of expansion of the fluid being monitored in order to properly compensate for thermal expansion of the fluid as it is heated while passing through the engine. The default value for this parameter is 0.033%/°C, which corresponds to Diesel fuel. This parameter is not available when the Operating Mode is set to “Two Individual Flow Sensors”.
6.13.5.1.4 Temperature Instance
Program this parameter to match the desired instance number of the temperature reading for this channel. You can program this parameter to any value between 0 and 252. The default value for this parameter is 0.
6.13.5.1.5 Temperature Source
Program this parameter to match the desired source type of the temperature reading for this channel. The default value for this parameter is 129 (User Defined).
6.13.5.1.6 Temperature Label
Program this parameter with a text string which identifies the particular temperature parameter being monitored by this channel. Maretron display products will display this label text when you are selecting data to display.
6.13.5.2 Channel #0 Configuration Menu (Two Independent Sensors Mode)
This section describes the Channel #0 configuration parameters when the FFM100’s operating mode has been set to “Two Independent Sensors”. The Channel #0 (Two Independent Sensors Mode) menu is too large to fit on a single screen, so it is shown in two separate screenshots below.
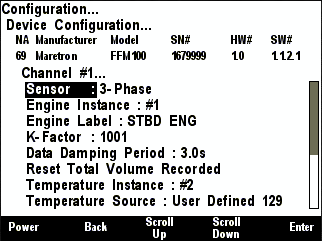
Figure 98 – FFM100 Channel #1 First Configuration Screen (Two Independent Sensors Mode)
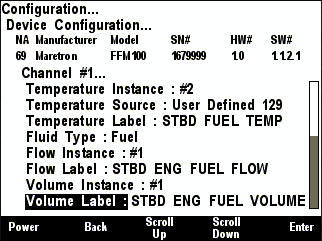
Figure 99 – FFM100 Channel #1 Second Configuration Screen (Two Independent Sensors Mode)
6.13.5.2.1 Sensor
You may select whether this channel is connected to a “3-phase” sensor (Maretron fuel flow sensors with three pulse outputs), or a “1-phase” sensor (other manufacturer’s fluid flow sensors with a single pulse output).
6.13.5.2.2 Engine Instance
Program this parameter to match the desired engine instance number of the flow rate and total fuel used for this channel. You can program this parameter to any value between 0 and 252.
6.13.5.2.3 Engine Label
Each channel has a text label you can set to identify the load controlled by that channel (for example, “PORT ENGINE” or “COOLING WATER FLOW”). For each channel, set this to a value which describes the flow being monitored so that you can easily identify it in display devices.
6.13.5.2.4 K-Factor
Program this parameter to match the K-factor that appears on the flow sensor connected to this channel.
6.13.5.2.5 Data Damping Period
You can configure a damping parameter to smooth the flow rate readings or make them more responsive. The data damping is configurable between 0.2-25.0 seconds. The default data damping period is 3.0 seconds.
6.13.5.2.6 Reset Total Volume Recorded
The FFM100 maintains the total volume recorded in EEPROM, so that it is maintained across power cycles. Select this menu entry to reset the total volume recorded to zero.
6.13.5.2.7 Temperature Instance
Program this parameter to match the desired instance number of the temperature reading for this channel. You can program this parameter to any value between 0 and 252. The default value for this parameter is 0.
6.13.5.2.8 Temperature Source
Program this parameter to match the desired source type of the temperature reading for this channel. The default value for this parameter is 129 (User Defined).
6.13.5.2.9 Temperature Label
Program this parameter with a text string which identifies the particular temperature parameter being monitored by this channel. Maretron display products will display this label text when you are selecting data to display.
6.13.5.2.10 Fluid Type
Program this parameter to match the type of fluid whose flow is being monitored.
6.13.5.2.11 Flow Instance
Program this parameter to match the desired instance number of the fluid flow reading for this channel. You can program this parameter to any value between 0 and 252. The default value for this parameter is 0.
6.13.5.2.12 Flow Label
Program this parameter with a text string which identifies the particular fluid flow parameter being monitored by this channel. Maretron display products will display this label text when you are selecting data to display.
6.13.5.2.13 Volume Instance
Program this parameter to match the desired instance number of the volume reading for this channel. You can program this parameter to any value between 0 and 252. The default value for this parameter is 0.
6.13.5.2.14 Volume Label
Program this parameter with a text string which identifies the particular volume parameter being monitored by this channel. Maretron display products will display this label text when you are selecting data to display.
6.14 Maretron FPM100 Configuration
The DSM410 is capable of configuring the Maretron FPM100 Fluid Pressure Monitor. This describes the configuration of the Maretron FPM100 firmware version 1.0.1.
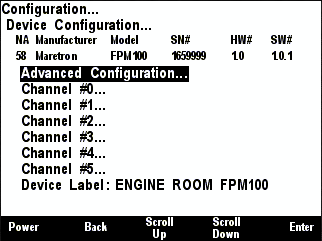
Figure 100 – FPM100 Configuration Screen
6.14.1 Advanced Configuration…
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
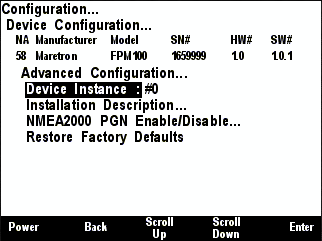
Figure 101 – FPM100 Advanced Configuration Screen
6.14.1.1 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.14.1.2 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later.
6.14.1.3 NMEA2000 PGN Enable/Disable…
The FPM100 Fluid Pressure Module transmits a number of the NMEA2000® PGNs which can be turned on or turned off by the DSM410 display. Pressing the Enter key with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410 to display the following screen (Figure 102).
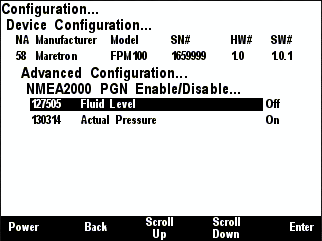
Figure 102 – FPM100 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable the transmission of a PGN message,
or set the frequency of transmission of the message by pressing the Enter key (![]() ) on the
message to be configured. Options are:
) on the
message to be configured. Options are:
Off – The PGN will not be transmitted
On – The PGN will be transmitted at its default NMEA2000 rate.
0.5s…5s – The PGN will be transmitted at the interval specified.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.14.1.4 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.14.2 Channel #0-5
This submenu contains configuration parameters for each of the six channels. These menus look different depending on whether the channel’s Function has been set to “Tank” or “Pressure/Vacuum”.
6.14.2.1 Channel #0-5 (Tank)
This section describes the channel configuration menu when the channel ‘s Function has been set to “Tank” mode. The Channel #0-5 (Tank Mode) menu is too large to fit on a single screen, so it is shown in two separate screenshots below.
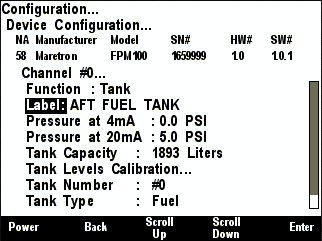
Figure 103 – FPM100 Channel #0 First Configuration Screen (Tank Mode)
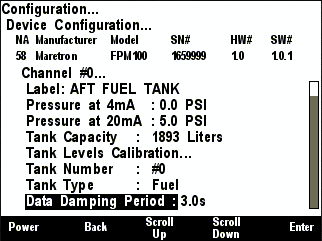
Figure 104 – FPM100 Channel #0 Second Configuration Screen (Tank Mode)
6.14.2.1.1 Function
You can set the channel’s Function to “Disabled”, “Tank”, or “Pressure/Vacuum”. This section of the manual assumes that the channel’s function has been set to “Tank”.
6.14.2.1.2 Label
This entry allows you to assign a text label to the device. This label is visible in Maretron analysis and display products and allows you to easily identify the particular device.
6.14.2.1.3 Pressure at 4mA
Program this parameter to match the pressure reading of the pressure transducer when it is sourcing a current of 4mA. You can determine this value by examining the specification of the pressure transducer being used.
6.14.2.1.4 Pressure at 20mA
Program this parameter to match the pressure reading of the pressure transducer when it is sourcing a current of 20mA. You can determine this value by examining the specification of the pressure transducer being used.
6.14.2.1.5 Tank Capacity
In addition to indicating the fluid level within a tank, the FPM100 also has the ability to be configured or programmed with the attached tank’s capacity. This way, you will be able to view the tank’s capacity as well as the amount of liquid remaining anywhere on the vessel where there is an NMEA 2000® compatible display.
6.14.2.1.6 Tank Levels Calibration…
In order for the FPM100 to indicate an accurate tank level, it must know the geometry of the tank. There are two methods of calibrating an FPM100 channel in Tank mode:
- Custom Calibration – use for non-rectangular tanks (also, most accurate in any case, but requires more effort)
- Rectangular Tank – By inputting some dimensions of a rectangular tank, the FPM100 is able to interpolate the volume of liquid from the bottom of the tank to the surface.
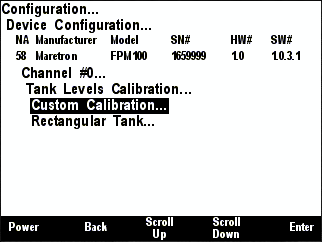
Figure 105 – FPM100 Tank Levels Calibration Menu
1.1.1.1.1.1 Custom Calibration
The Custom Calibration setting will provide the most
accurate tank level readings under any circumstances, but it requires that you
go through a process in which you gradually fill the tank, stopping
periodically to input the current fluid level. The TLA100 will measure the
sender resistance at each point and create a custom calibration map which
relates the resistance of the sender with the fluid levels. Custom calibration
is necessary for non-rectangular tanks and for non-standard values of resistances
for tank level senders. To perform custom calibration of the tank level sender,
use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to move the
highlighted cursor over the “Custom Calibration…” menu item. Then, press the
Enter key (
) keys to move the
highlighted cursor over the “Custom Calibration…” menu item. Then, press the
Enter key (![]() ) to confirm your selection and begin the calibration process.
) to confirm your selection and begin the calibration process.
The first step in custom calibration of the tank level
sender is to provide an estimated capacity of the tank. This estimated capacity
must be within +/- 25% of the actual capacity. To set the estimated tank capacity,
use the arrow keys to adjust the displayed value until the desired value is
shown. Then, press the Accept key to confirm your selection and continue with
the calibration process. If you desire to stop the calibration process,
pressing the Back Key (![]() ) will end the process and
return you to the Tank Levels Calibration menu.
) will end the process and
return you to the Tank Levels Calibration menu.
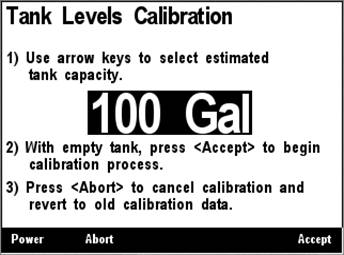
Figure 106 – Tank Levels Calibration Capacity Estimation
The next step in the calibration process is to fill the tank and indicate the volume of fluid in the tank at various points while filling the tank. This process should be started with an empty tank. You only need to indicate two calibration points for a rectangular tank, and can use up to 16 calibration points for a tank with a more complex shape. Figure 107 shows a screenshot of the first calibration step. Enter the first calibration point with an empty tank (0.0 Gallons/liters) by pressing the Accept key. The “Current Point” highlight will advance to the next point.
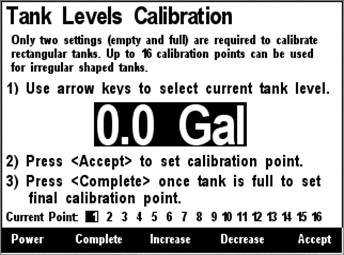
Figure 107 – Empty Level Calibration
Each time you press Accept during this process and after the Current Point highlight advances, put more fluid into the tank, and note the total volume of fluid pumped into the tank at this point. Use the Increase and Decrease keys to set the current tank level to the appropriate value, and then press the Accept key to store the current calibration point and advance to the next calibration point. Figure 108 shows a screenshot of these intermediate calibration points.
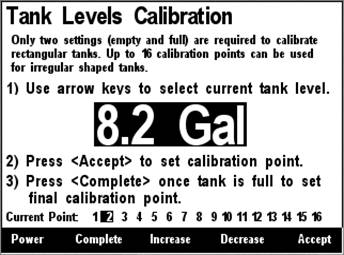
Figure 108 – Intermediate Level Calibration
Once the tank is completely full, instead of pressing the Accept key to store the current calibration point, press the Complete key. This will complete the calibration process and will also adjust the tank capacity to the currently indicated level. Figure 109 below shows the calibration screen at the last point with the full tank level (and thus the tank capacity) set to 101 gallons.
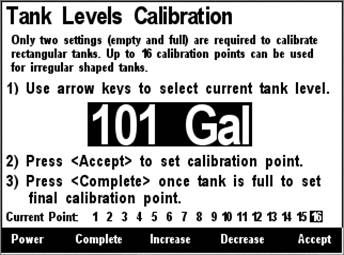
Figure 109 – Full Level Calibration
After you press accept, a confirmation screen will appear showing completion of the calibration process and the new tank capacity value. A screenshot of this calibration screen is shown below in Figure 110.
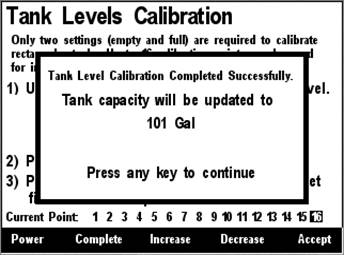
Figure 110 – Custom Tank Level Calibration Confirmation Screen
1.1.1.1.1.2 Rectangular Tank
This menu allows calibration of the FPM100 for tanks with a rectangular cross-section.
Empty Tank Depth - enter the depth of the fluid when the tank is empty (this distance is usually zero)
Full Tank Depth - enter the depth of the fluid when the tank is full (this is the distance from the surface of the fluid to the bottom of the tank)
Fluid Density - enter the density of the fluid whose depth is being measured. There are preset values for various types of diesel fuels, as well as gasoline and water.
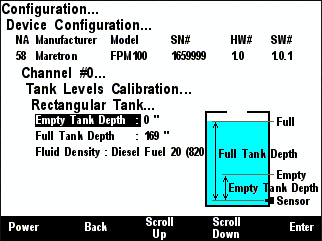
Figure 111 – Rectangular Tank Calibration
6.14.2.1.7 Tank Number
The Tank Number is the Data Instance used in the data message. This can be set from #0 to #15.
6.14.2.1.8 Tank Type
This is set to the type of fluid in the tank. Values are:
· Fuel
· Fresh Water
· Waste Water
· Live Well
· Oil
· Black Water
· Reserved-1…Reserved-7 – These values may be used when the contents of the tank does not fit into one of the categories above.
6.14.2.1.9 Data Damping Period
If the channel’s Function is set to Tank, the default data damping period is 16.0 seconds. If the channel’s Function is set to Pressure/Vacuum, the default data damping period is 3.0 seconds.
6.14.2.2 Channel #0-5 (Pressure/Vacuum)
This section describes the channel configuration menu when the channel‘s Function has been set to “Pressure/Vacuum” mode. The Channel #0-5 (Pressure/Vacuum Mode) menu is shown below.
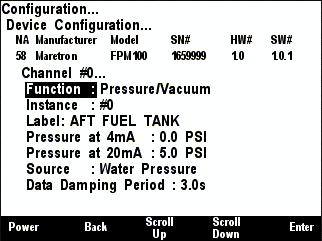
Figure 112 – FPM100 Channel (Pressure/Vacuum Mode) Configuration
6.14.2.2.1 Function
You can set the channel’s Function to “Disabled”, “Tank”, or “Pressure/Vacuum”. This section of the manual assumes that the channel’s function has been set to “Pressure/Vacuum”.
6.14.2.2.2 Instance
This entry sets the instance number to be used in the Pressure message. This entry may be set to ay value between 0 and 252.
6.14.2.2.3 Label
A label may be assigned to each channel of the FPM100 as an aid to identifying the pressure that is being displayed. Typically this label will describe the function or location of the pressure sensor.
6.14.2.2.4 Pressure at 4mA
Enter the pressure measured by the pressure sensor when it is outputting a 4mA current (this will usually be zero).
6.14.2.2.5 Pressure at 20mA
Enter the pressure measured by the pressure sensor when it is outputting a 20mA current.
6.14.2.2.6 Source
In the NMEA2000® PGNs, each pressure is associated with a source type. Possible values are:
Water Pressure
Atmospheric Pressure
Compressed Air Pressure
Hydraulic Pressure
Steam Pressure
User Defined Temperature #129...#144 – Use this when none of the above options are suitable.
6.14.2.2.7 Data Damping Period
If the channel’s Function is set to Tank, the default data damping period is 16.0 seconds. If the channel’s Function is set to Pressure/Vacuum, the default data damping period is 3.0 seconds.
6.15 Maretron GPS100 Configuration
This describes the configuration of the Maretron GPS100 firmware version 2.0.1. Some versions of the GPS100 have a different set of firmware that is currently at version 1.6.14. The configuration of these devices is identical to version 2.0.1 shown here. The GPS100 has several different programmable parameters that are configurable by the DSM410 display. Normally, it is not necessary to configure the GPS100 although there may be some circumstances where configuration is desirable. The following sections describe the different configuration modes including the “Restore Factory Defaults” configuration, which allows you to return the GPS100 to the factory settings.
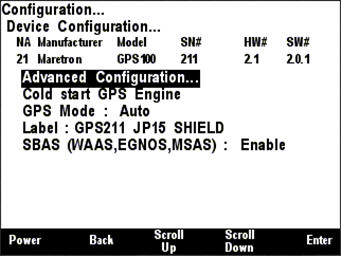
Figure 113 – GPS100 Configuration Screen
6.15.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea. The Advanced Configuration Screen is shown below.
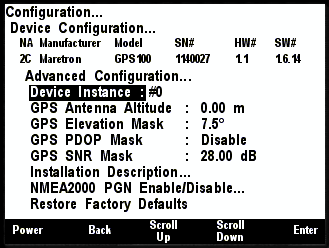
Figure 114 – GPS100 Advanced Configuration Screen
6.15.1.1 Device Instance
The Device Instance will be used to identify the GPS100 device on the network. Unless there are multiple GPSs on the network, this should be left at zero.
6.15.1.2 GPS Antenna Altitude
The DSM410 is capable of setting the antenna altitude on a
Maretron GPS100. You can choose this setting by pressing the Enter key (![]() ) with the “Antenna Altitude:” menu item selected which causes the
screen shown in Figure 115 to be displayed.
) with the “Antenna Altitude:” menu item selected which causes the
screen shown in Figure 115 to be displayed.
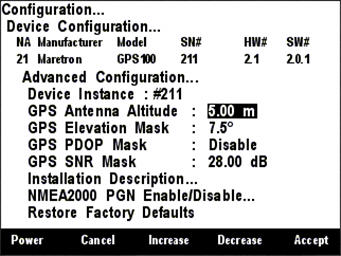
Figure 115 – Configuring Antenna Altitude on a GPS100
The allowable values for the Antenna Altitude are between -100m and 100m. This number represents the altitude or the GPS100, and is used to improve the quality of the position fix if only a two-dimensional fix is obtainable. If a three-dimensional position fix is obtainable, this value is not used.
6.15.1.3 Elevation Mask
The DSM410 is capable of setting the Elevation Mask on a
Maretron GPS100. You can choose this setting by pressing the Enter key (![]() ) with the “Elevation Mask:” menu item selected which causes the screen
shown in Figure 116 to be displayed.
) with the “Elevation Mask:” menu item selected which causes the screen
shown in Figure 116 to be displayed.
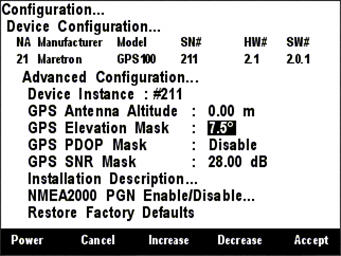
Figure 116 – Configuring Satellite Elevation Mask on a GPS100
The allowable values for Elevation Mask are between -90° and 90°. This number represents the elevation of a satellite above the horizon. Satellites with 0° elevation are at the horizon, while satellites with 90° elevation are directly overhead. The GPS will exclude satellites with an elevation lower than the value of this parameter from the position solution.
6.15.1.4 PDOP Mask
The DSM410 is capable of setting the PDOP Mask on a Maretron
GPS100. You can choose this setting by pressing the Enter key (![]() )
with the “PDOP Mask:” menu item selected which causes the screen shown in Figure 117 to be displayed.
)
with the “PDOP Mask:” menu item selected which causes the screen shown in Figure 117 to be displayed.
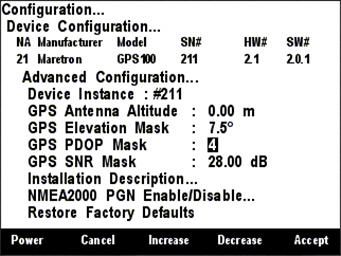
Figure 117 – Configuring PDOP Mask on a GPS100
The allowable values for PDOP Mask are between 1 and 20. This number represents the Position Dilution of Precision, which indicates the accuracy of the computed position and is a function of the positions of the received satellites. If the PDOP of a given position solution is above the value of this parameter, then the GPS100 will report that no fix is obtained. Disabling the PDOP Mask by setting the value to “-“) will cause the GPS100 to report any position fixes obtained, regardless of the accuracy of the fix.
6.15.1.5 SNR Mask
The DSM410 is capable of setting the SNR (Signal to Noise
Ratio) Mask on a GPS100. You choose this setting by pressing the Enter key (![]() ) with the GPS SNR Mask menu item selected which results in the
screen shown in Figure 118.
) with the GPS SNR Mask menu item selected which results in the
screen shown in Figure 118.
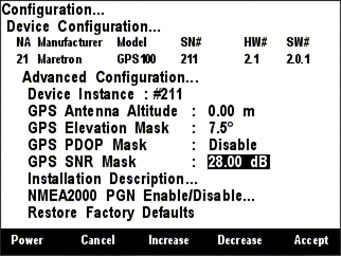
Figure 118 – Configuring SNR Mask on a GPS100
The allowable values for the SNR Mask are between 1 dB and 60 dB. This number represents the signal to noise ratio of a satellite’s signal as received by the GPS100. Higher numbers indicate a better quality signal. The GPS will exclude satellites with signal to noise ratios lower than the value of this parameter from the position solution.
6.15.1.6 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See section 3.3.4 for details on how to enter a textual value.
6.15.1.7 NMEA 2000® PGN Enable/Disable
The GPS100 transmits several different messages, which can
be turned on or turned off by the DSM410 display. Pressing the Enter key (![]() ) with
“NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410
to display the screen shown in Figure 119.
) with
“NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410
to display the screen shown in Figure 119.
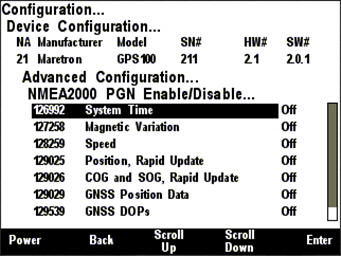
Figure 119 – GPS100 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable specific transmissions by scrolling (![]() or
or ![]() ) through the different
transmitted messages and pressing the Enter key (
) through the different
transmitted messages and pressing the Enter key (![]() ) on the message to be
configured. Select whether you want the message to be transmitted (“On”) or
disabled (“Off”) using the Scroll Up (
) on the message to be
configured. Select whether you want the message to be transmitted (“On”) or
disabled (“Off”) using the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys followed by the
Enter key (
) keys followed by the
Enter key (![]() ).
).
6.15.1.8 Restore Factory Defaults
The DSM410 is capable of restoring all programmable settings
on a Maretron GPS100 to the factory default condition. You can choose this
setting by pressing the Enter key (![]() ) with the “Restore Factory
Defaults” menu item selected which causes the screen shown in Figure 120 to be displayed. This will cause the GPS100 to set all programmable
settings to the factory default condition.
) with the “Restore Factory
Defaults” menu item selected which causes the screen shown in Figure 120 to be displayed. This will cause the GPS100 to set all programmable
settings to the factory default condition.
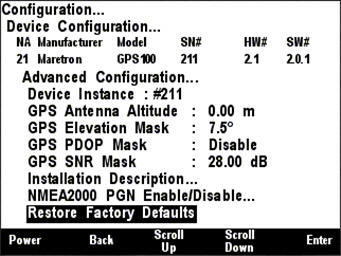
Figure 120 – Restoring Factory Defaults on the GPS100
6.15.2 Cold Start GPS
The DSM410 is capable of restarting the GPS algorithm on a
Maretron GPS100. You can choose this setting by pressing the Enter key (![]() ) with the
“Cold start GPS Engine” menu item selected which causes the screen shown in Figure 121 to be displayed. This will cause the GPS100 to discard all position and
satellite data and compute a position fix.
) with the
“Cold start GPS Engine” menu item selected which causes the screen shown in Figure 121 to be displayed. This will cause the GPS100 to discard all position and
satellite data and compute a position fix.
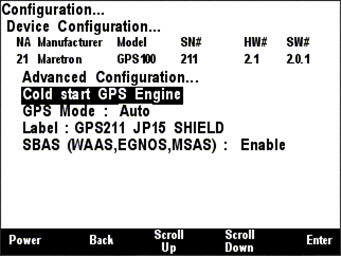
Figure 121 – Performing a Cold Start of the GPS100
6.15.3 GPS Mode Setting
The DSM410 is capable of setting the minimum operating mode
on a Maretron GPS100. You can choose this setting by pressing the Enter key (![]() ) with the “GPS Mode:” menu item selected which causes the screen shown
in Figure 122 to be displayed.
) with the “GPS Mode:” menu item selected which causes the screen shown
in Figure 122 to be displayed.
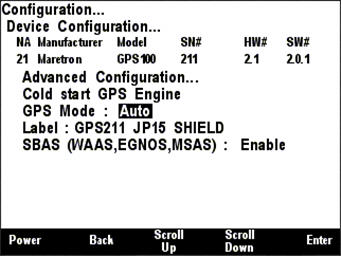
Figure 122 – Configuring GPS Operating Mode on a GPS100
The allowable options for GPS Mode are “1D” which allows the GPS to report data when only a one-dimensional fix (time only) or better is obtained; “2D”, which allows the GPS to report data only when a two-dimensional fix or better is obtained; “3D”, which allows the GPS to report data only when a three-dimensional fix or better is obtained, or “Auto” (default), which allows the GPS to report any available data, regardless of the quality of the fix.
6.15.4 Device Label
A label may be assigned to the GPS100 as an aid to identifying the device over the network. Typically this would describe the location of the GPS on the vessel.
See section 3.3.4 for details on how to enter a textual value.
6.15.5 SBAS (WAAS) Enable/Disable
The DSM410 is capable of enabling or disabling the SBAS
(WAAS) function on a Maretron GPS Antenna/Receiver (GPS100). You can change
this setting by pressing the Enter key (![]() ) with the “SBAS:
WAAS,EGNOS,MSAS:” menu item selected which causes the screen shown in Figure 123 to be displayed.
) with the “SBAS:
WAAS,EGNOS,MSAS:” menu item selected which causes the screen shown in Figure 123 to be displayed.
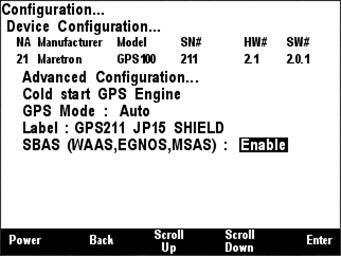
Figure 123 – Configuring SBAS on a GPS100
The allowable option for SBAS configuration are either “Disable” which causes the GPS100 not to use SBAS satellites, or “Enable” which causes the GPS100 to use SBAS satellites for developing a position fix.
6.16 Maretron GPS200 Configuration
This describes the configuration of the Maretron GPS200 firmware version 3.5.0. The GPS200 has several different programmable parameters that are configurable by the DSM410 display. Normally, it is not necessary to configure the GPS200 although there may be some circumstances where configuration is desirable. The following sections describe the different configuration modes including the “Restore Factory Defaults” configuration, which allows you to return the GPS200 to the factory settings.
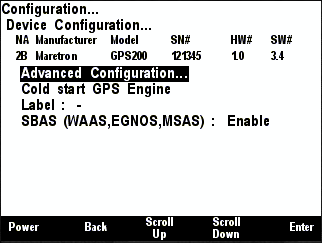
Figure 124 – GPS200 Configuration Screen
6.16.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea. The Advanced Configuration Screen is shown below.
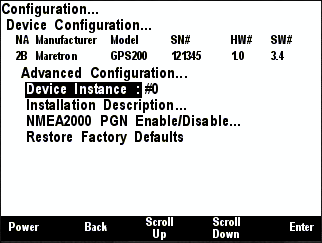
Figure 125 – GPS200 Advanced Configuration Screen
6.16.1.1 Device Instance
The Device Instance will be used to identify the GPS200 device on the network. Unless there are multiple GPSs on the network, this should be left at zero.
6.16.1.2 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See section 3.3.4 for details on how to enter a textual value.
6.16.1.3 NMEA 2000® PGN Enable/Disable
The GPS200 transmits several different messages, which can
be turned on or turned off by the DSM410 display. Pressing the Enter key (![]() ) with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410
to display the screen shown in Figure 119.
) with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410
to display the screen shown in Figure 119.
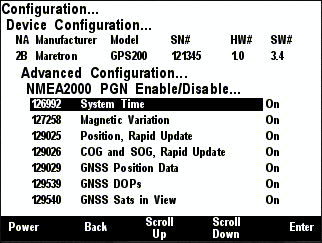
Figure 126 – GPS200 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable specific transmissions by scrolling (![]() or
or ![]() )
through the different transmitted messages and pressing the Enter key (
)
through the different transmitted messages and pressing the Enter key (![]() ) on the message to be configured. Select whether you want the message
to be transmitted (“On”) or disabled (“Off”) using the Scroll Up (
) on the message to be configured. Select whether you want the message
to be transmitted (“On”) or disabled (“Off”) using the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys followed by the Enter key
(
) keys followed by the Enter key
(![]() ).
).
6.16.1.4 Restore Factory Defaults
The DSM410 is capable of restoring all programmable settings
on a Maretron GPS200 to the factory default condition. You can choose this
setting by pressing the Enter key (![]() ) with the “Restore Factory
Defaults” menu item selected which causes the screen shown in Figure 120 to be displayed. This will cause the GPS200 to set all programmable
settings to the factory default condition.
) with the “Restore Factory
Defaults” menu item selected which causes the screen shown in Figure 120 to be displayed. This will cause the GPS200 to set all programmable
settings to the factory default condition.
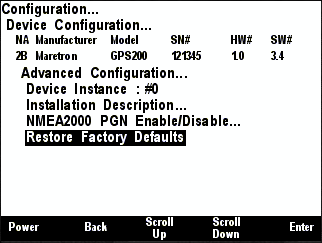
Figure 127 – Restoring Factory Defaults on the GPS200
6.16.2 Cold Start GPS
The DSM410 is capable of restarting the GPS algorithm on a
Maretron GPS200. You can choose this setting by pressing the Enter key (![]() ) with the “Cold start GPS Engine” menu item selected which causes the
screen shown in Figure 121 to be displayed. This will cause the GPS200 to
discard all position and satellite data and compute a position fix.
) with the “Cold start GPS Engine” menu item selected which causes the
screen shown in Figure 121 to be displayed. This will cause the GPS200 to
discard all position and satellite data and compute a position fix.
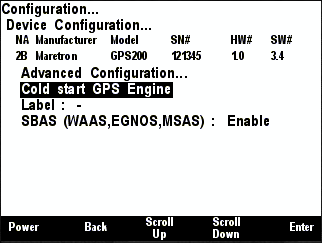
Figure 128 – Performing a Cold Start of the GPS200
6.16.3 Device Label
A label may be assigned to the GPS200 as an aid to identifying the device over the network. Typically this would describe the location of the GPS on the vessel.
See section 3.3.4 for details on how to enter a textual value.
6.16.4 SBAS (WAAS,EGNOS,MSAS) Enable/Disable
The DSM410 is capable of enabling or disabling the SBAS
(WAAS) function on a Maretron GPS Antenna/Receiver (GPS200). You can change
this setting by pressing the Enter key (![]() ) with the “SBAS:
WAAS,EGNOS,MSAS:” menu item selected which causes the screen shown in Figure 123 to be displayed.
) with the “SBAS:
WAAS,EGNOS,MSAS:” menu item selected which causes the screen shown in Figure 123 to be displayed.
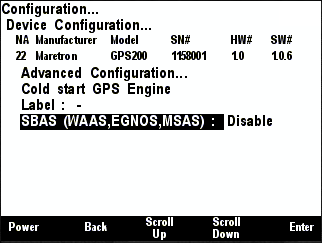
Figure 129 – Configuring SBAS on a GPS200
The allowable option for SBAS configuration are either “Disable” which causes the GPS200 not to use SBAS satellites, or “Enable” which causes the GPS200 to use SBAS satellites for developing a position fix.
6.17 Maretron IPG100 Configuration
This describes the configuration of the Maretron IPG100 firmware version 3.6.0. The DSM410 is capable of configuring settings for the Internet Protocol Gateway (IPG100). A screenshot of the IPG100 configuration menus is shown in Figure 130 below.
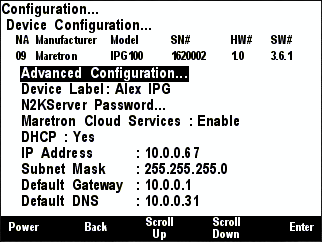
Figure 130 – IPG100 Configuration Screen
1.1.2 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
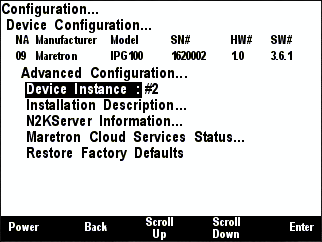
Figure 131 – IPG100 Advanced Configuration Screen
6.17.1.1 Device Instance
Program this parameter to the desired instance number for this device. You can program this parameter to any value between 0 and 252. The default device instance is 0.
6.17.1.2 Installation Description
This entry allows you to modify the NMEA 2000® installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer® allow you to view these values later. The default installation description is blank text.
6.17.1.3 N2KServer Information
This entry allows you to view various information about the N2KServer running on the IPG100. The following sections describe the entries in this menu.
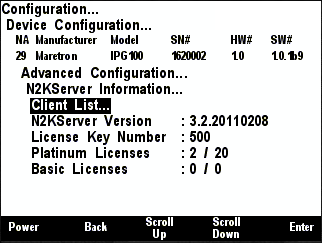
Figure 132 – IPG100 N2KServer Information Screen
6.17.1.3.1 Client List
For each N2KView client connected to the IPG100, this entry displays the following information:
· Lic. (License) – this field indicates the type of N2KView license in use by the client. It will indicate “P” for a platinum license, and “B” for a basic license.
· Inst. (Instance) – this field indicates the instance number used by this N2KView client.
· IP Address – this field indicates the IP address of the N2KView client. If it is followed by the letter “E”, this indicates that the connection is encrypted.
· Label – this field indicates the label assigned to the N2KView client
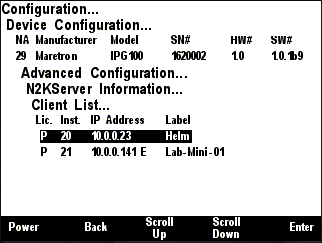
Figure 133 – IPG100 Client List Display
6.17.1.3.2 N2KServer Version
This entry shows the version number of the N2KServer software currently running on the IPG100.
6.17.1.3.3 License Key Number
This entry shows the serial number of the Hardware Licensee Key currently plugged into the IPG100.
6.17.1.3.4 Platinum Licenses
This entry shows the number of platinum licenses in use, followed by a slash, followed by the total number of platinum licenses.
6.17.1.3.5 Basic Licenses
This entry shows the number of basic licenses in use, followed by a slash, followed by the total number of basic licenses.
6.17.1.4 Maretron Cloud Services Status…
This entry shows a window displaying the current status of the connection to Maretron Cloud Services. Maretron Technical Support personnel may ask for the information in this window if there is a problem connecting to Maretron Cloud Services.
Figure 134 – IPG100 Maretron Cloud Services Status Display
6.17.1.5 Restore Factory Defaults
This option restores all settings on the IPG100 device to their factory default state.
6.17.2 Device Label
Program this parameter with a text string which identifies this device. Maretron display products will display this label text when you are selecting data to display. The default device label is blank.
6.17.3 N2KServer Password
Program this parameter with a text password. Any connecting N2KView® clients must be programmed with the same password in the “Connections Settings -> N2KServer® Connection ->Password” field in the N2KView® software. The default password is blank.
6.17.4 Maretron Cloud Services
This entry allows you to enable the IPG100 to use Maretron Cloud Services. Maretron Cloud Services allows you to easily connect to the IPG100 from any N2KView® client, whether it is a Windows PC, or an iOS or Android smartphone or tablet. If you have an active Maretron Cloud Services account, you must change this setting to “Enable” so that the IPG100 will connect to Maretron Cloud Services. If you do not use Maretron Cloud Services, change this setting to “Disable”.
6.17.5 DHCP
This parameter determines whether or not the IPG100 obtains its LAN connection settings from a DHCP server on the local area network. When set to “Yes” (the default value), the IPG100 will obtain all necessary connection settings (IP Address, Subnet Mask, Default Gateway, and Default DNS) from a DHCP server on the local area network. Most routers have the capability to act as a DHCP server. Consult the user documentation for your network’s router for details.
If there is no DHCP server on the local area network (or if the IPG100 is connected directly to a DSM800 or directly to an MBB100), set the “DHCP” parameter to “No” and manually configure the IP Address (section 6.17.6), Subnet Mask (section 6.17.7), Default Gateway (section 6.17.8), Default DNS (section 6.17.9).
6.17.6 IP Address
This parameter is the IP (Internet Protocol) address used by the IPG100. You will need to specify this address to N2KView® clients in order to allow them to connect to the IPG100. If the “DHCP” parameter is set to “Yes”, you do not need to configure this parameter. If the “DHCP” parameter is set to “No”, you will need to configure this parameter.
6.17.7 Subnet Mask
This is a mask used to divide an IP Address into subnets. Basically, it tells the computer how much of the IP Address defines the network, and how much may be used by computers on the network. For most networks, the first three parts of the IP address define the network (i.e., every computer on the network must have the same values), and the last part defines the computer (i.e., every computer on the network must have a different value). Where the value 255 appears in the subnet mask, the values define the network and must be the same.
The most common value is 255.255.255.0.
If the “DHCP” parameter is set to “Yes”, you do not need to configure this parameter. If the “DHCP” parameter is set to “No”, you will need to configure this parameter.
6.17.8 Default Gateway
This is the IP address of the router. If the “DHCP” parameter is set to “Yes”, you do not need to configure this parameter. If the “DHCP” parameter is set to “No”, you will need to configure this parameter.
6.17.9 Default DNS
This is the IP address of a computer on the Internet that can identify and locate computer systems and resources on the internet. In most cases, this should not be required by the IPG100 and may be left blank. If the “DHCP” parameter is set to “No”, you will need to configure this parameter.
6.18 Maretron J2K100 Configuration
This describes the configuration of the Maretron J2K100 firmware version 1.0.13.2. The DSM410 is capable of configuring settings for the J1939 to NMEA 2000® Gateway (J2K100). A screenshot of the J2K100 configuration menu is shown in Figure 135 below.
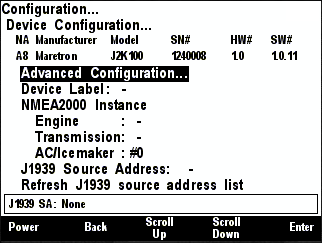
Figure 135 – J2K100 Configuration Screen
6.18.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
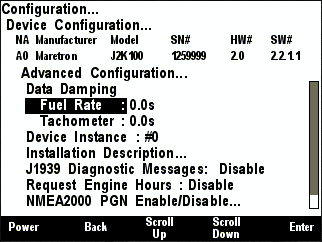
Figure 136 – J2K100 Advanced Configuration Screen
6.18.1.1 Data Damping
In order to smooth the results viewed on a display, you may individually change the data damping period that the J2K100 uses when sending fuel rate and tachometer (engine RPM) information. The default is to use no damping (0.0 seconds). You may program the damping from none up to 5 seconds.
6.18.1.2 Device Instance
The Device Instance will be used to identify the J2K100 module on the network. If a GenSet is connected to the J1939 network, and the AC parameters passed through the J2K100 interface, the GenSet will also be identified using Device Instance number.
6.18.1.3 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See section 3.3.4 for details on how to enter a textual value.
6.18.1.4 J1939 Diagnostic Messages
The J2K100 can optionally pass through J1939 diagnostic
messages, used to indicate fault conditions on engines and transmissions, from
the J1939 interface to the NMEA2000® network so that NMEA 2000®
connected displays can interpret these diagnostic codes. To change the
transmission status of the J1939 diagnostic messages, use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to move the highlighted
cursor to the “J1939 Diagnostic Messages:” menu item. Then, press the Enter key
(
) keys to move the highlighted
cursor to the “J1939 Diagnostic Messages:” menu item. Then, press the Enter key
(![]() ) to move the highlight to the
value field, which displays either Enable or Disable. Use the Scroll Up (
) to move the highlight to the
value field, which displays either Enable or Disable. Use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to change the value to
the desired value, and then press the Enter key (
) keys to change the value to
the desired value, and then press the Enter key (![]() ) to accept the
new value and store it within the J2K100.
) to accept the
new value and store it within the J2K100.
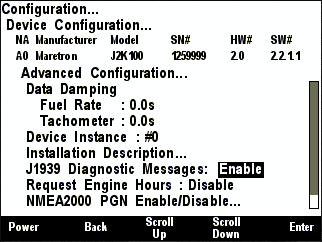
Figure 137 – J2K100 J1939 Diagnostic Messages Configuration
6.18.1.5 Request Engine Hours
Some engines do not transmit their engine hours over the J1939 bus without receiving a request for engine hours from another device on the J1939 network. If there is no other device to request the engine hours from these engines, then you will not be able to see engine hours on NMEA 2000 displays. Setting this parameter to “Enable” will case the J2K100 to periodically transmit a request for engine hours to the engine, allowing the engine hours to be seen on the NMEA 2000 network and connected displays.
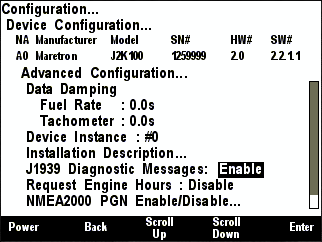
Figure 138 – J2K100 Request Engine Hours Configuration
6.18.1.6 NMEA2000 PGN Enable/Disable
The J2K100 interface transmits several different messages,
which can be turned on or turned off by the DSM410
display. Pressing the Enter key (![]() ) with “NMEA2000 PGN
Enable/Disable…” menu item selected causes the DSM410
to display the following screen.
) with “NMEA2000 PGN
Enable/Disable…” menu item selected causes the DSM410
to display the following screen.
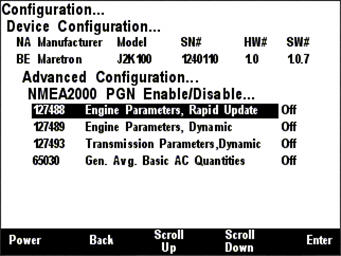
Figure 139 – J2K100 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable specific transmissions by scrolling (![]() or
or ![]() ) through the different
transmitted messages and pressing the Enter key (
) through the different
transmitted messages and pressing the Enter key (![]() ) on the message to be
configured. Select whether you want the message to be transmitted (“On”) or
disabled (“Off”) using the Scroll Up (
) on the message to be
configured. Select whether you want the message to be transmitted (“On”) or
disabled (“Off”) using the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys followed by the
Enter key (
) keys followed by the
Enter key (![]() ).
).
6.18.1.7 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.18.2 Device Label
A label may be assigned to the J2K100 as an aid to identifying the device over the network.
See section 3.3.4 for details on how to enter a textual value.
6.18.3 NMEA 2000 Instance – Engine
This entry allows the engine to be mapped to an NMEA2000
instance number. Each engine on an NMEA 2000® network must have a
unique instance identifier, to allow display devices to distinguish it from
other engines on the network. The “NMEA2000 Engine Instance:” menu item allows
you to configure the engine instance identifier which will be sent over the NMEA
2000® network along with engine-related NMEA 2000®
messages. In order to configure this parameters, use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to move the highlighted
cursor to the “NMEA2000 Engine Instance:” menu item. Then, press the Enter key
(
) keys to move the highlighted
cursor to the “NMEA2000 Engine Instance:” menu item. Then, press the Enter key
(![]() ) to move the highlight to the
numeric value on the right, as shown in Figure 140 below.
) to move the highlight to the
numeric value on the right, as shown in Figure 140 below.
Because only one such mapping can take place, each engine on the J1939 network must have its own J2K100 Gateway. The J1939 Source Address (see section 6.18.4) identifies the engine on the J1939 network, the Engine Instance identifies the engine to the NMEA2000 network.
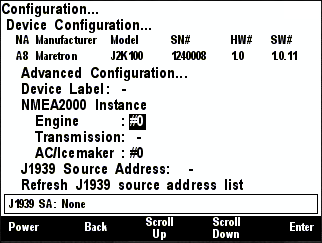
Figure 140 – J2K100 Engine Instance Configuration
Use the Scroll Up and Scroll Down keys to change the value to the desired value you wish to use as the engine instance identifier, and then press the Enter key to accept the value and store it within the J2K100.
6.18.4 Transmission Instance
This entry allows a transmission to be mapped to an NMEA2000
instance number. Each transmission on an NMEA 2000® network must
have a unique instance identifier, to allow display devices to distinguish it
from other transmissions on the network. The “NMEA2000 Transmission Instance:”
menu item allows you to configure the transmission instance identifier which
will be sent over the NMEA 2000® network along with transmission-related
NMEA 2000® messages. In order to configure this parameters, use the
Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to move the highlighted
cursor to the “NMEA2000 Transmission Instance:” menu item. Then,
press the Enter key (
) keys to move the highlighted
cursor to the “NMEA2000 Transmission Instance:” menu item. Then,
press the Enter key (![]() ) to move the highlight to the
numeric value on the right, as shown in Figure 141 below. Because only one such
mapping can take place, each Transmission and each Engine on the J1939 network
must have its own J2K100 Gateway. The J1939 Source Address (see section 6.18.4) identifies the transmission on the J1939 network, the Transmission Instance
identifies the transmission to the NMEA2000 network.
) to move the highlight to the
numeric value on the right, as shown in Figure 141 below. Because only one such
mapping can take place, each Transmission and each Engine on the J1939 network
must have its own J2K100 Gateway. The J1939 Source Address (see section 6.18.4) identifies the transmission on the J1939 network, the Transmission Instance
identifies the transmission to the NMEA2000 network.
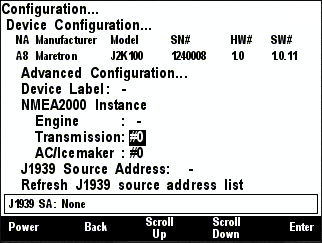
Figure 141 – J2K100 NMEA2000 Transmission Instance Configuration
Use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to change the
value to the desired value you wish to use as the transmission instance
identifier, and then press the Enter key (
) keys to change the
value to the desired value you wish to use as the transmission instance
identifier, and then press the Enter key (![]() ) to accept the value and store
it within the J2K100.
) to accept the value and store
it within the J2K100.
6.18.5 AC/Icemaker Instance
This entry allows an air conditioner or icemaker to be
mapped to an NMEA2000 instance number. Each air conditioner or icemaker on an NMEA
2000® network must have a unique instance identifier, to allow
display devices to distinguish it from other air conditioners or icemakers on
the network. The “AC/Icemaker:” menu item allows you to configure the air
conditioner or instance identifier which will be sent over the NMEA 2000®
network along with air conditioner or icemaker-related NMEA 2000®
messages. In order to configure this parameters, use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to move the highlighted
cursor to the “AC/Icemaker:” menu item. Then, press the Enter key (
) keys to move the highlighted
cursor to the “AC/Icemaker:” menu item. Then, press the Enter key (![]() ) to move the highlight to the numeric value on the right, as shown in Figure 142 below. Because only one such mapping can take place, each air conditioner
or icemaker on the J1939 network must have its own J2K100 Gateway. The J1939
Source Address (see Section 6.18.4) identifies the air conditioner or icemaker
on the CAN network, the AC/Icemaker Instance identifies the air conditioner or
icemaker to the NMEA2000 network.
) to move the highlight to the numeric value on the right, as shown in Figure 142 below. Because only one such mapping can take place, each air conditioner
or icemaker on the J1939 network must have its own J2K100 Gateway. The J1939
Source Address (see Section 6.18.4) identifies the air conditioner or icemaker
on the CAN network, the AC/Icemaker Instance identifies the air conditioner or
icemaker to the NMEA2000 network.
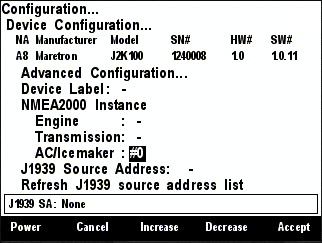
Figure 142 – J2K100 NMEA2000 AC/Icemaker Instance Configuration
Use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() )
keys to change the value to the desired value you wish, and then press the
Enter key (
)
keys to change the value to the desired value you wish, and then press the
Enter key (![]() ) to accept the value and store
it within the J2K100.
) to accept the value and store
it within the J2K100.
6.18.6 J1939 Source Address Configuration
A J1939 engine/genset and transmission has its own source address on the J1939 network, which is different from NMEA 2000® addresses. The J2K100 is capable of serving as a gateway between a single J1939 engine/genset or a single transmission and the NMEA 2000® network. This setting identifies the J1939 source address of the engine/genset and a transmission for which the J2K100 will serve as a gateway.
For air conditioners or icemakers, the “J1939 source address” refers to the source address of the air conditioner or icemaker on the AC/Icemaker CAN network.
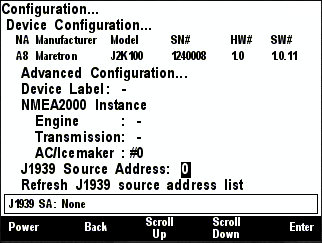
Figure 143 – J2K100 J1939 Source Address Configuration
To set the J1939 source address, use the Scroll Up and Scroll Down keys to move the highlighted cursor to the “J1939 Source Address:” menu item. Press the Enter key to move the cursor over to the source address value on the right, as shown in Figure 143 above. Then, use the Scroll Up and Scroll Down keys to change the J1939 Source Address value until it matches the J1939 source address of the engine/genset or transmissions for which you desire this J2K100 to translate data onto the NMEA 2000® network.
6.18.7 Refresh J1939 source address list
The configuration screen for the J2K100 will examine the bus to determine to which devices it can connect. This is presented in a list at the bottom of the screen. To update the list after adding a device, highlight this entry, and press the Enter button.
6.19 Maretron NBE100 Configuration
The DSM410 is capable of configuring the Maretron NBE100 Network Bus Extender. This describes the configuration of the Maretron NBE100 firmware version 1.0.0. The NBE100 configuration menu is shown in Figure 144 below.
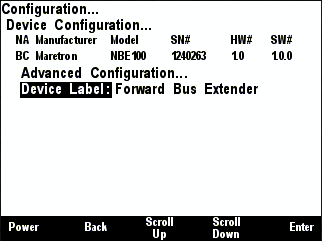
Figure 144 – NBE100 Configuration Screen
6.19.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
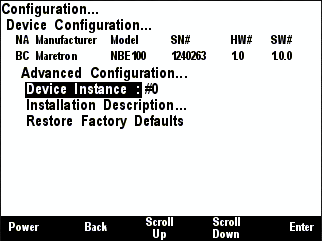
Figure 145 – NBE100 Advanced Configuration Screen
1.1.2.1 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
1.1.2.2 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later.
1.1.2.3 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.20 Maretron RAA100 Configuration
This describes the configuration of the Maretron RAA100 firmware version 1.4.9.
Maretron RAA100 rudder angle adapters on the network may be configured using the DSM410. The RAA100 configuration menu is shown in Figure 146 below.
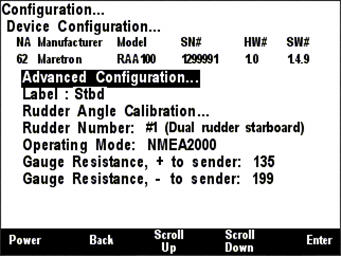
Figure 146 – RAA100 Configuration Screen
6.20.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
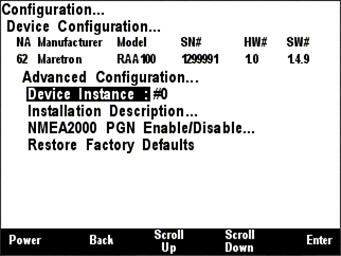
Figure 147 – RAA100 Advanced Configuration Menu
6.20.1.1 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.20.1.2 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See Section 3.3.4 for details on how to enter a textual value.
6.20.1.3 NMEA2000 PGN Enable/Disable
The RAA100 Rudder Angle Adapter transmits the NMEA2000 PGN #127245 which can be turned on or turned off by the DSM410 display. Pressing the Enter key with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410 to display the following screen (Figure 148).
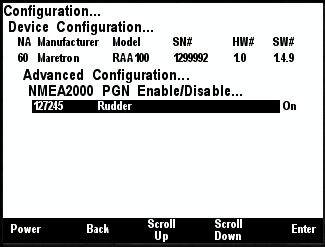
Figure 148 – RAA100 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable the transmission of the Rudder message by pressing the Enter key on the message to be configured. Options are:
· Disable – The status message will not be transmitted
· Default – The status message will be transmitted at its default NMEA2000 rate.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.20.1.4 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.20.2 Label
A label may be assigned to the RAA100 as an aid to identifying the device over the network. Typically this label will describe the rudder to which the RAA100 is connected (e.g. Port Rudder).
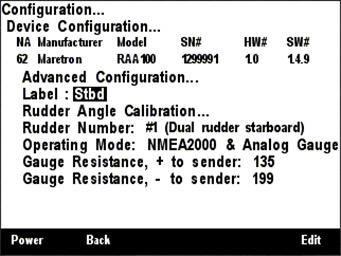
Figure 149 – RAA100 Label Configuration
See Section 3.3.4 for details on how to enter a textual value.
6.20.3 Rudder Angle Calibration
In order for the RAA100 to indicate an accurate rudder angle, it must know how the resistance of the resistive rudder angle sender corresponds to the rudder angle. The following screen will be displayed:
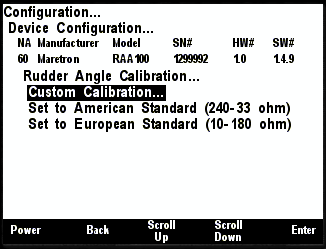
Figure 150 – RAA100 Rudder Angle Calibration Options
There are three methods of calibrating the rudder angle sender:
6.20.3.1 Custom Calibration
The Custom Calibration setting will provide the most accurate rudder angle readings under any circumstances, but it requires that you go through a process in which you set the rudder to full port, then center, and then full starboard, each time indicating the angle of the rudder to the DSM410. The RAA100 will measure the sender resistance at each point and create a custom calibration map which relates the resistance of the sender with the rudder angle. Custom calibration is necessary for non-standard values of resistances for rudder angle senders and for rudders with maximum port and starboard angles of anything other than 45°.
To perform custom calibration of the rudder angle sender,
use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() )
keys to move the highlighted cursor over the “Custom Calibration…” menu item.
Then, press the Enter key (
)
keys to move the highlighted cursor over the “Custom Calibration…” menu item.
Then, press the Enter key (![]() ) to confirm your selection and
begin the calibration process. Figure 151 shows the DSM410
with the Custom Rudder Calibration menu item highlighted.
) to confirm your selection and
begin the calibration process. Figure 151 shows the DSM410
with the Custom Rudder Calibration menu item highlighted.
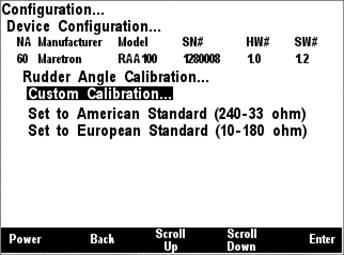
Figure 151 – RAA100 Custom Rudder Angle Calibration
The first step in the custom rudder angle sender calibration
process is to turn the wheel hard over to starboard, and to measure the angle
or the rudder (angle from center) with a protractor or other instrument. Use
the Increase and Decrease keys until the highlighted rudder angle value is at
the measured value, and then press Enter to accept the value and store it
within the RAA100. Figure 152 shows a screenshot of the starboard rudder
calibration screen. You may also press the Abort Key (![]() ) to end the
calibration process.
) to end the
calibration process.
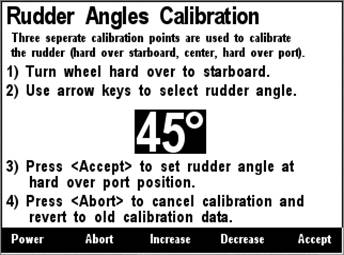
Figure 152 – RAA100 Starboard Rudder Angle Calibration
The second step in the custom rudder angle sender
calibration process is to turn the wheel so that the rudder is centered as much
as possible. Next, press Enter to accept the value and store it within the
RAA100. Figure 153 shows a screenshot of the center rudder calibration screen.
You may also press the Abort Key (![]() ) to end the calibration
process.
) to end the calibration
process.
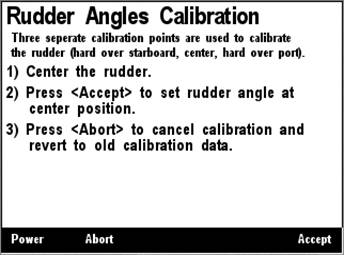
Figure 153 – RAA100 Center Rudder Angle Calibration
The third step in the custom rudder angle sender calibration
process is to turn the wheel hard over to port, and to measure the angle or the
rudder (angle from center) with a protractor or other instrument. Use the
Increase and Decrease keys until the highlighted rudder angle value is at the
measured value, and then press Enter to accept the value and store it within
the RAA100. Figure 152 shows a screenshot of the starboard rudder calibration
screen. You may also press the Abort Key (![]() ) to end the
calibration process.
) to end the
calibration process.
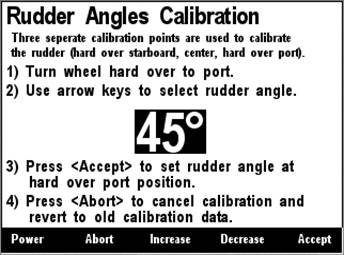
Figure 154 – RAA100 Port Rudder Angle Calibration
Once you have accepted the port rudder angle value, a confirmation screen appears indicating that the rudder angle calibration has been successfully completed. Figure 155 below shows a screenshot of this confirmation screen.
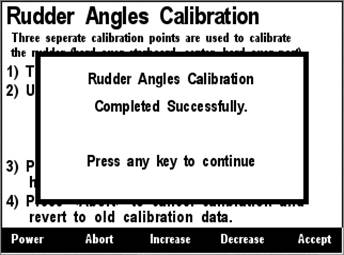
Figure 155 – RAA100 Custom Rudder Calibration Confirmation Screen
6.20.3.2 Set to American Standard (240-33 ohm)
Use the option for rudders using a rudder angle sender with the standard American resistance range (240 ohms at full port 45°, 33 ohms at full starboard 45°).
6.20.3.3 Set to European Standard (0-180 ohm)
Use this option for rudders using a rudder angle sender with the standard European resistance range (0 ohms at full port 45°, 180 ohms at full starboard 45°).
6.20.4 Rudder Number
First, the rudder number must be configured. For a vessel with a single rudder, the number should be set to “0”. For a vessel with two rudders, the port rudder should be set to “0” and the starboard rudder should be set to “1”. Each rudder must have a rudder number that is different from all other rudders. A screenshot of rudder number configuration is shown in Figure 156 below.
In order to configure the rudder number, use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to move the highlighted
cursor to “Rudder Number:”, then press the Enter key (
) keys to move the highlighted
cursor to “Rudder Number:”, then press the Enter key (![]() ) to move the
cursor over to the rudder number value. Use the Scroll Up (
) to move the
cursor over to the rudder number value. Use the Scroll Up (![]() ) or
Scroll Down (
) or
Scroll Down (![]() ) keys to select the desired
rudder number. Finally, press the Enter key (
) keys to select the desired
rudder number. Finally, press the Enter key (![]() ) to confirm
your selection and store the new rudder number within the RAA100.
) to confirm
your selection and store the new rudder number within the RAA100.
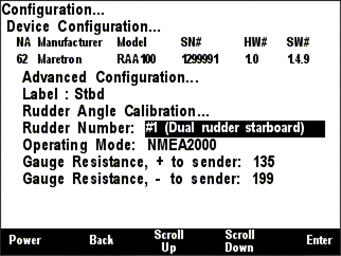
Figure 156 – RAA100: Setting the Rudder Number
6.20.5 Operating Mode
The RAA100 can be operated in one of two operating modes, depending on the installation.
· NMEA 2000 (the only thing that is connected to the resistive sender is the RAA100)
· NMEA 2000 & Analog Gauge (in addition to the RAA100, the resistive sender is also connected to a dual-coil analog gauge).
It is important that this setting be performed correctly in
order for the RAA100 to produce correct angle measurements. A screenshot
showing configuration of the operating mode appears in Figure 157 below. To
configure the operating mode, use the Scroll Up (![]() ) or Scroll
Down (
) or Scroll
Down (![]() ) keys to move the highlighted
cursor over the “Operating Mode:” menu item, then press the Enter key (
) keys to move the highlighted
cursor over the “Operating Mode:” menu item, then press the Enter key (![]() ) to move the highlight over the operating mode value. Use the Scroll Up
(
) to move the highlight over the operating mode value. Use the Scroll Up
(![]() ) or Scroll Down (
) or Scroll Down (![]() )
keys to change the operating mode to the desired value, and finally, press the
Entry key to confirm your selection and store the operating mode within the
RAA100.
)
keys to change the operating mode to the desired value, and finally, press the
Entry key to confirm your selection and store the operating mode within the
RAA100.
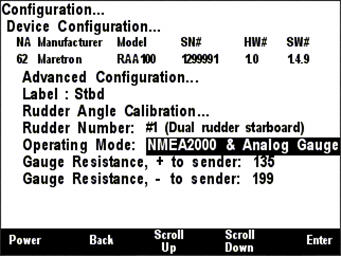
Figure 157 – RAA100: Setting the Operating Mode
6.20.6 Gauge Resistance, + to Sender
If the desired operating mode is “NMEA 2000 & Analog
Gauge”, the two gauge resistances must be programmed (please refer to the RAA100
User’s Manual for details on how to perform these measurements). A screenshot
of the + to sender gauge resistance configuration is shown in Figure 158 below. To program the + to sender gauge resistance, use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to move the highlighted
cursor over the “Gauge Resistance, + to Sender:” menu item. Then, press the
Enter key (
) keys to move the highlighted
cursor over the “Gauge Resistance, + to Sender:” menu item. Then, press the
Enter key (![]() ) to move the highlight over the
numerical resistance value. Use the “Increase” and “Decrease” keys to change
the value to the measured resistance value, and finally, press the Enter key (
) to move the highlight over the
numerical resistance value. Use the “Increase” and “Decrease” keys to change
the value to the measured resistance value, and finally, press the Enter key (![]() ) to confirm your selection and store the value within the RAA100.
) to confirm your selection and store the value within the RAA100.
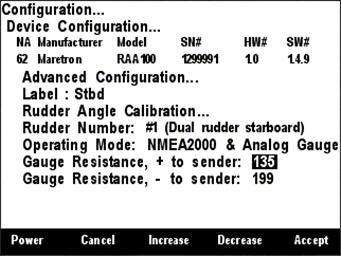
Figure 158 – RAA100: Setting the + to Sender Gauge Resistance
6.20.7 Gauge Resistance, - to Sender
If the desired operating mode is “NMEA 2000 & Analog
Gauge”, the two gauge resistances must be programmed (please refer to the RAA100
User’s Manual for details on how to perform these measurements). A
screenshot of the - to sender gauge resistance configuration is shown in Figure 159 below. To program the - to sender gauge resistance, use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to move the highlighted
cursor over the “Gauge Resistance, - to Sender:” menu item. Then, press the
Enter key (
) keys to move the highlighted
cursor over the “Gauge Resistance, - to Sender:” menu item. Then, press the
Enter key (![]() ) to move the highlight over the
numerical resistance value. Use the “Increase” and “Decrease” keys to change
the value to the measured resistance value, and finally, press the Enter key (
) to move the highlight over the
numerical resistance value. Use the “Increase” and “Decrease” keys to change
the value to the measured resistance value, and finally, press the Enter key (![]() ) to confirm your selection and store the value within the RAA100.
) to confirm your selection and store the value within the RAA100.
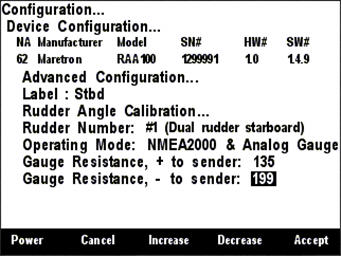
Figure 159 – RAA100: Setting the – to Sender Gauge Resistance
6.21 Maretron RIM100 Configuration
This describes the configuration of the Maretron RIM100 firmware version 1.1.1.
The DSM410 may be used to configure the channels on the Run Indicator Module (RIM100).
After selecting the RIM100 from the list of devices on the network, the following screen will be displayed.
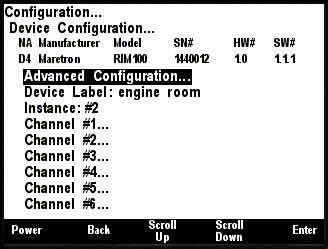
Figure 160 – RIM100 Configuration Screen
6.21.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
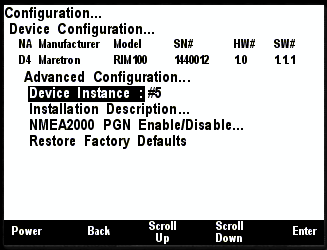
Figure 161 – RIM100 Advanced Configuration Screen
6.21.1.1 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.21.1.2 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See Section 3.3.4 for details on how to enter a textual value.
6.21.1.3 NMEA2000 PGN Enable/Disable
The RIM100 Run Indicator Module transmits the NMEA2000 PGN #127501 which can be turned on or turned off by the DSM410 display. Pressing the Enter key with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410 to display the following screen (Figure 162).
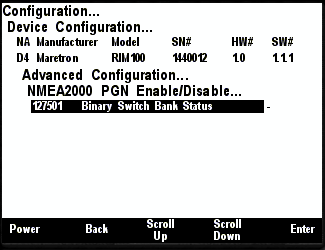
Figure 162 – RIM100 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable the transmission of the Binary
Switch Status message, or set the frequency of transmission of the message by
pressing the Enter key (![]() ) on the message to be
configured. Options are:
) on the message to be
configured. Options are:
· Disable – The status message will not be transmitted
· Default – The status message will be transmitted at its default NMEA2000 rate, which is once every 15 seconds, and each time the value changes.
· 1s...15s – The status message will be transmitted at the period specified, and each time the value changes.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.21.1.4 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.21.2 Device Label
A label may be assigned to the RIM100 as an aid to identifying the device over the network. Typically this label will describe the location of the RIM100. See Section 3.3.4 for details on how to enter a textual value.
6.21.3 Instance
From here the instance used in the data message may be set.
6.21.4 Channel Configuration
To configure an individual channel, use the Scroll Up and Scroll Down buttons to highlight the channel, and then press Enter. The following screen will be displayed.
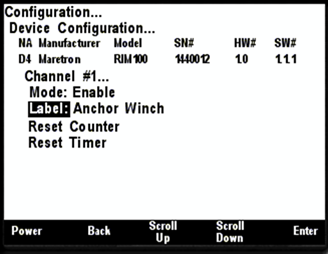
Figure 163 – RIM100 Channel Configuration Screen
6.21.4.1 Mode
Each Channel may be enabled or disabled. Valid Modes are:
· Disable – the channel is not being used
· Enable– the channel is being used
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.21.4.2 Label
A label may be assigned to a channel as an aid to identifying the channel over the network. Typically this label will describe the equipment to which the channel is connected.
See Section 3.3.4 for details on how to enter a textual value.
6.21.4.3 Reset Counter
This resets the hardware counter associated with this channel to zero.
6.21.4.4 Reset Timer
This resets the hardware timer associated with this channel to zero.
6.22 Maretron SIM100 Configuration
This describes the configuration of the Maretron SIM100 firmware version 1.1.1.
The DSM410 may be used to configure the channels on the Switch Indicator Module (SIM100).
After selecting the SIM100 from the list of devices on the network, the following screen will be displayed.
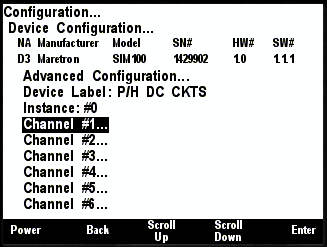
Figure 164 – SIM100 Configuration Screen
6.22.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
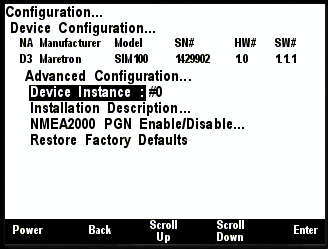
Figure 165 – SIM100 Advanced Configuration Screen
6.22.1.1 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.22.1.2 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See Section 3.3.4 for details on how to enter a textual value.
6.22.1.3 NMEA2000 PGN Enable/Disable
The SIM100 Switch Indicator Module transmits the NMEA2000 PGN #127501 which can be turned on or turned off by the DSM410 display. Pressing the Enter key with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410 to display the following screen (Figure 166).
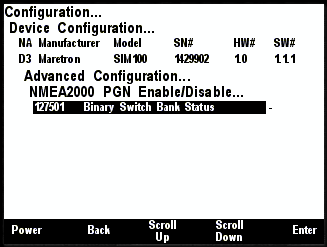
Figure 166 – SIM100 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable the transmission of the Binary
Switch Status message, or set the frequency of transmission of the message by
pressing the Enter key (![]() ) on the message to be
configured. Options are:
) on the message to be
configured. Options are:
· Disable – The status message will not be transmitted
· Default – The status message will be transmitted at its default NMEA2000 rate, which is once every 15 seconds, and each time the value changes.
· 1s...15s – The status message will be transmitted at the period specified, and each time the value changes.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.22.1.4 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.22.2 Device Label
A label may be assigned to the SIM100 as an aid to identifying the device over the network. Typically this label will describe the location of the SIM100. See Section 3.3.4 for details on how to enter a textual value.
6.22.3 Instance
From here the instance used in the data message may be set.
6.22.4 Channel Configuration
To configure an individual channel, use the Scroll Up and Scroll Down buttons to highlight the channel, and then press Enter. The following screen will be displayed.
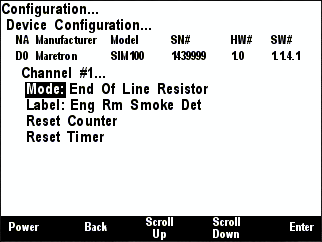
Figure 167 – SIM100 Channel Configuration Screen
6.22.4.1 Mode
To be able to detect broken connections, a SIM100 channel may be configured to detect an 8kΩ resistor at the end of the circuit in the open state. In this case a fully open circuit will reported as a fault condition. See the manual for details.
Valid Modes are:
· Disable – the channel is not being used
· End Of Line Resistor – an open circuit is a fault condition.
· No End Of Line Resistor – an open circuit is not a fault condition.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.22.4.2 Label
A label may be assigned to a channel as an aid to identifying the channel over the network. Typically this label will describe the function of the switch connected to the channel.
See Section 3.3.4 for details on how to enter a textual value.
6.22.4.3 Reset Counter
This resets the hardware counter associated with this channel to zero.
6.22.4.4 Reset Timer
This resets the hardware timer associated with this channel to zero.
6.23 Maretron SMS100 Configuration
This describes the configuration of the Maretron SMS100 firmware version 2.0.1.9. The display may be used to configure the Device Instance and Installation Description on the SMS (Text) Module (SMS100). After selecting the SMS100 from the list of devices on the network, the following screen will be displayed.
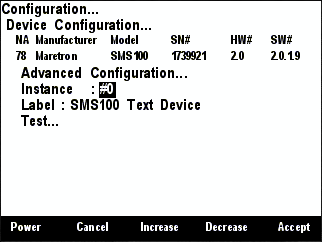
Figure 168 – SMS100 Configuration Screen
6.23.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically, advanced configuration is only done at installation and should not need to be done while at sea.
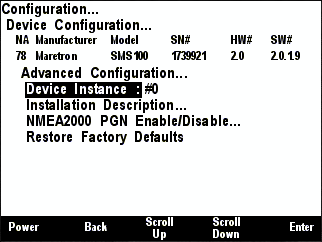
Figure 169 – SMS100 Advanced Configuration Menu
6.23.1.1 Device Instance
Program this parameter to the desired instance number for this device. You can program this parameter to any value between 0 and 252. You usually will not need to modify the default value of “0”.
6.23.1.2 Installation Description…
This entry allows you to modify the NMEA 2000® installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer® allow you to view these values later. The default installation description is blank text. See Section 3.3.4 for details on how to enter a textual value.
6.23.1.3 NMEA2000 PGN Enable/Disable…
The SMS100 SMS (Text) Module transmits the NMEA2000 PGN #12
which can be turned on or turned off by the display. Pressing the Enter key (![]() ) with “NMEA2000
PGN Enable/Disable…” menu item selected causes the display to show the
following screen (Figure 170).
) with “NMEA2000
PGN Enable/Disable…” menu item selected causes the display to show the
following screen (Figure 170).
Figure 170 – SMS100 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable the transmission of the various
messages, or set the frequency of transmission of the messages by pressing the
Enter key (![]() ) on the message to be configured. Options are:
) on the message to be configured. Options are:
- Disable – The status message will not be transmitted
- Default – The status message will be transmitted at its default NMEA2000 rate, which is once every 15 seconds, and each time the value changes.
- 1s...15s – The status message will be transmitted at the period specified.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.23.1.4 Restore Factory Defaults
This option restores all settings on the SMS100 device to their factory default states.
6.23.2 Label
A label may be assigned to a channel as an aid to identifying the device over the network. Typically this label will describe the function or location of the device.
See Section 3.3.4 for details on how to enter a textual value.
6.23.3 Test…
This screen allows you to perform some basic diagnostics of the SMS100 and its connection to the cellular network. If you select the “Test…” item in the SMS100 configuration menu, the screen in Figure 171 will be displayed.
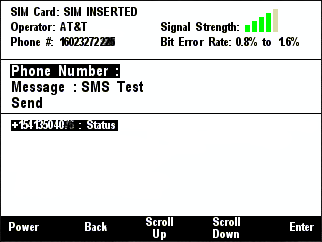
Figure 171 – SMS100 Test Screen
The top section of the screen shows the current operating status of the SMS100.
· SIM Card – This entry shows the status of the SIM card. Normally, it should show “SIM INSERTED”.
· Operator – This entry identifies the cellular provider the SMS100 is currently connected to.
· Phone # - This entry identifies the phone number used by the SMS100. This phone number is defined by the SIM card which is installed in the SMS100.
· Signal Strength – This entry shows the signal strength of the cellular network as seen by the SMS100. This signal strength is shown on a scale of one to five bars.
· Bit Error Rate – This entry shows the bit error rate of the cellular network connection. This figure may be requested by Maretron technical support personnel.
The middle section of the screen allows you to send a SMS text message to an arbitrary phone number. To send a test message, enter the phone number to which you wish to send the message into the “Phone Number” field, then enter the text of the message to be sent into the “Message” field, and finally, scroll to the “Send” field and press the Enter key. The text in the Message field will be sent to the telephone number in the “Phone Number” field.
The bottom section of the screen displays the SMS text messages most recently received by the SMS100. You can test SMS100 message reception by using a cellular telephone to send a SMS text message to the telephone number of the SMS100, and then watching for the message to appear on this section of the screen within a few seconds to a minute or longer, depending on the cellular network.
6.24 Maretron SSC200/SSC300 Configuration
This section describes the configuration of the Maretron SSC200 firmware version 5.0.3 and SSC300 firmware version 1.0. Nine configurable parameters for the Maretron SSC200/SSC300 solid state compass may be configured using the Maretron DSM410 display. The Maretron SSC200/SSC300 configuration menu can be seen in Figure 172 below.
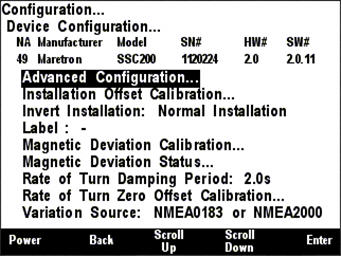
Figure 172 – SSC200/SSC300 Configuration Screen
6.24.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
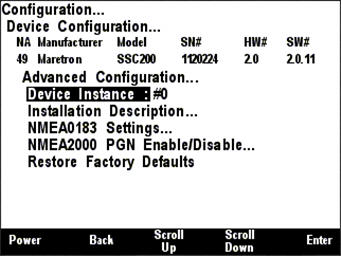
Figure 173 – SSC200/SSC300 Advanced Configuration Screen
6.24.1.1 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.24.1.2 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See Section 3.3.4 for details on how to enter a textual value.
6.24.1.3 NMEA0183 Settings
Several characteristics of the NMEA 0183 interface of the SSC200/SSC300 may be programmed using the DSM410 display. This can be used for initial programming of a SSC200/SSC300 compass even if only the NMEA 0183 interface is to be used after installation is complete. Figure 174 below shows the possible programming options for the NMEA 0183 interface.
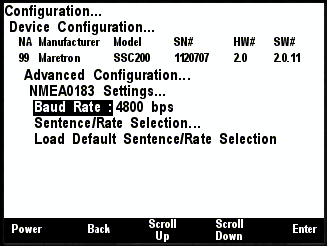
Figure 174 – SSC200/SSC300 NMEA 0183 Settings Screen
6.24.1.3.1 Baud Rate
The SSC200/SSC300 compass supports NMEA0183 communication at both 4800 baud and 38400 baud. All SSC200/SSC300 Compasses are shipped with a baud rate of 4800 baud. This value may be changed by selecting the Baud Rate option in the menu, and pressing Enter. The use the Scroll Up and Scroll Down buttons to select the desired baud rate and press Enter to save the value.
6.24.1.3.2 Sentence / Rate Selection
The NMEA 0183 interface is a very low bandwidth interface. The SSC200/SSC300 is capable of transmitting a wide variety of NMEA 0183 sentences, and can exceed the bandwidth of the NMEA 0183 interface if all sentences are transmitted at maximum rates, causing lost data in NMEA 0183 multiplexers or on the SSC200/SSC300 interface itself. It is important, therefore, to limit the types of NMEA 0183 sentences transmitted only to those that are necessary for other products which are connected to the NMEA 0183 interface. Figure 175 below shows the SSC200/SSC300 NMEA 0183 Settings -> Sentence/Rate Selection menu. In this menu, you can selectively enable and disable the different NMEA 0183 sentences that the SSC200/SSC300 can transmit, and you can program the transmission interval for the enabled sentences. In the figure, you can see that the HDG and ROT sentences will be transmitted every 0.1 second (10 times/second), the ATT sentence will be transmitted once per second, and the HDM and HDT sentences are disabled.
The last line in the menu enables you to program the lifetime of the variation data received by the SSC200/SSC300. In Figure 175, you can see that the “Variation Time” has been programmed to 5.0 seconds. This means that if the compass has not received magnetic variation for five seconds, it will no longer transmit true heading data, as the variation data it has received is now expired. On the NMEA2000 side, the Heading PGN has separate fields for heading sensor reading and variation. The SSC200/SSC300 always has magnetic heading available; when variation is not available (timeout or invalid) the variation field is set to N/A. The default value of 5.0 seconds should be adequate for the majority of applications, but it may need to be increased for variation sources that transmit less frequently.
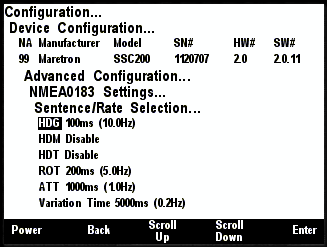
Figure 175 – SSC200/SSC300 NMEA 0183 Sentence/Rate Selection Screen
6.24.1.3.3 Load Default Sentence / Rate Selection
The Load Default Sentence / Rate Selection option will reset the NMEA 0183 sentence enable/disable status, along with transmission intervals and variation time, to their factory default settings.
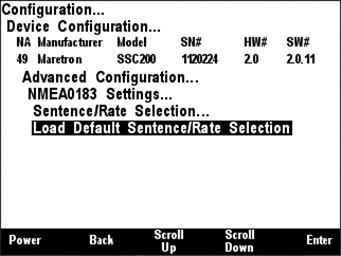
Figure 176 – SSC200/SSC300 Load Default Periodic Rate Selection
6.24.1.4 NMEA2000 PGN Enable/Disable
The SSC200/SSC300 compass transmits several different
messages, which can be turned on or turned off by the DSM410
display. Pressing the Enter key (![]() ) with “NMEA2000 PGN
Enable/Disable…” menu item selected causes the DSM410
to display the following screen.
) with “NMEA2000 PGN
Enable/Disable…” menu item selected causes the DSM410
to display the following screen.
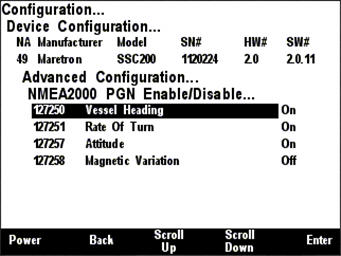
Figure 177 – SSC200/SSC300 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable specific transmissions by scrolling (![]() or
or ![]() )
through the different transmitted messages and pressing the Enter key (
)
through the different transmitted messages and pressing the Enter key (![]() ) on the
message to be configured. Select whether you want the message to be transmitted
(“On”) or disabled (“Off”) using the Scroll Up (
) on the
message to be configured. Select whether you want the message to be transmitted
(“On”) or disabled (“Off”) using the Scroll Up (![]() ) or Scroll Down
(
) or Scroll Down
(![]() ) keys followed by the Enter key (
) keys followed by the Enter key (![]() ).
).
6.24.1.5 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.24.2 Installation Offset Calibration
The installation offset (i.e., misalignment of installed
SSC200/SSC300 with vessel’s center line) may be calibrated using the Maretron DSM410 display. While executing “Installation Offset Calibration”, the vessel must stay still
with no pitch and roll because SSC200/SSC300 will also calibrate pitch and roll
at this time. Once the compass is installed, point the vessel at a known
heading, and then select the compass from the “Device Configuration…” menu.
Scroll down (![]() ) the menu items to the line
entitled “Installation Offset Calibration…” and press enter (
) the menu items to the line
entitled “Installation Offset Calibration…” and press enter (![]() )
which takes you to the screen shown in Figure 178.
)
which takes you to the screen shown in Figure 178.
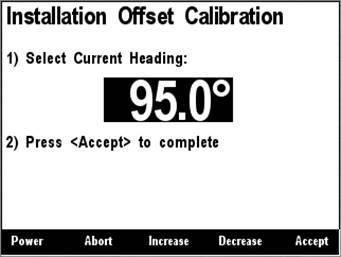
Figure 178 – SSC200/SSC300 Installation Offset Calibration Screen
Use the Increase (![]() ) and Decrease (
) and Decrease (![]() ) keys
to adjust the display value until it matches the known heading to which the
boat is pointed. Press the Accept (
) keys
to adjust the display value until it matches the known heading to which the
boat is pointed. Press the Accept (![]() ) key to accept the value when
you are satisfied. If you do not wish to perform installation offset
calibration at this time, press the Abort (
) key to accept the value when
you are satisfied. If you do not wish to perform installation offset
calibration at this time, press the Abort (![]() ) key and the
installation offset will not be altered.
) key and the
installation offset will not be altered.
6.24.3 Inverted Installation Entry
Normally, the SSC200/SSC300 is mounted so that the label on the compass is facing up and the NMEA 2000® and NMEA 0183 connectors are facing towards the bow of the vessel. A recent version of SSC200/SSC300 firmware supports mounting the compass upside-down (for instance, to a ceiling), or backwards (with connectors facing towards the stern of the vessel, so that the SSC200/SSC300 can be mounted to the aft side of a bulkhead). If either of these mounting options is used, the DSM410 can be used to inform the SSC200/SSC300 of this fact so that it can adjust heading, rate or turn, pitch, and roll readings to be corrected accordingly.
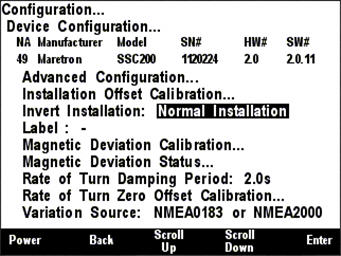
Figure 179 – Setting the Installation Orientation
The choices that are offered are “Normal Installation” (default), “Backward Installation”, “Upside-Down Installation”, or “Upside Down and Backward”.
6.24.4 Label
This menu item allows you to set a text label for the device. This text label will help you to identify a particular device when you have more than one of the same type in the system, and appears when selecting devices in both the DSM410 and in N2KView.
See Section 3.3.4 for details on how to enter a textual value.
6.24.5 Magnetic Deviation Calibration
The DSM410 is capable of performing magnetic deviation calibration on a Maretron SSC200/SSC300 solid state compass. The Rate of Turn Offset Calibration (Section 6.24.8) should be done before the Deviation Calibration. The first screen (Figure 180) gives instructions for performing the procedure. First, begin to turn the boat in a slow circle (either clockwise or counter-clockwise) at about 3 to 12 degrees per second.
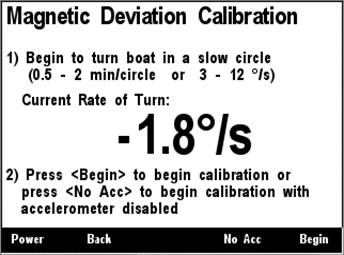
Figure 180 – SSC200/SSC300 Magnetic Deviation Calibration Start Screen
Once you have begun the turn, press Begin (![]() ) to
start the calibration procedure. If you do not wish to perform magnetic
deviation calibration at this time, press Abort (
) to
start the calibration procedure. If you do not wish to perform magnetic
deviation calibration at this time, press Abort (![]() ), and the
currently stored deviation tables will be retained. If you are in a large
vessel, it may be difficult to turn the vessel in a small enough circle to
avoid significant centrifugal force applied to the compass during magnetic
deviation calibration. This can cause the built-in tilt sensors inside the
compass to mistakenly believe that the compass is tilted during the magnetic
deviation calibration, which can adversely affect the quality of the magnetic
deviation calibration, especially in northerly latitudes where magnetic
inclination (magnetic dip) is higher. If this is the case, instead of pressing
the Begin (
), and the
currently stored deviation tables will be retained. If you are in a large
vessel, it may be difficult to turn the vessel in a small enough circle to
avoid significant centrifugal force applied to the compass during magnetic
deviation calibration. This can cause the built-in tilt sensors inside the
compass to mistakenly believe that the compass is tilted during the magnetic
deviation calibration, which can adversely affect the quality of the magnetic
deviation calibration, especially in northerly latitudes where magnetic
inclination (magnetic dip) is higher. If this is the case, instead of pressing
the Begin (![]() ) key, press the No Acc (
) key, press the No Acc (![]() ) key. This will cause the compass to ignore its tilt sensors and assume
that the compass is level to the earth’s surface during the calibration. You
must keep the boat level during calibration if you choose this option. After
you press the Begin (
) key. This will cause the compass to ignore its tilt sensors and assume
that the compass is level to the earth’s surface during the calibration. You
must keep the boat level during calibration if you choose this option. After
you press the Begin (![]() ) key or the No Acc (
) key or the No Acc (![]() ) key, a status screen will appear (Figure 181).
) key, a status screen will appear (Figure 181).
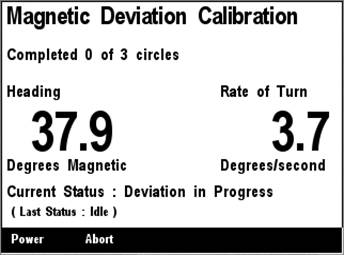
Figure 181 – SSC200/SSC300 Magnetic Deviation Calibration Progress Screen
This progress screen shows the number of circles completed,
the current heading, the current rate of turn, and the current status of
compass calibration. If you do not wish to continue magnetic deviation
calibration at this time, press Abort (![]() ), and the currently stored
deviation tables will be retained. Once calibration is successful, a completion
screen will appear. If calibration is unsuccessful, a screen will appear
indicating this, and you should repeat the calibration procedure.
), and the currently stored
deviation tables will be retained. Once calibration is successful, a completion
screen will appear. If calibration is unsuccessful, a screen will appear
indicating this, and you should repeat the calibration procedure.
6.24.6 Magnetic Deviation Status
Pressing the Enter key (![]() ) with the
“Magnetic Variation Status…” menu item selected causes the screen shown in Figure 182 to be displayed.
) with the
“Magnetic Variation Status…” menu item selected causes the screen shown in Figure 182 to be displayed.
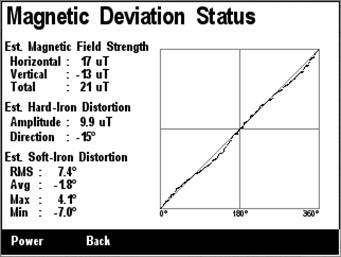
Figure 182 – SSC200/SSC300 Magnetic Deviation Status Screen
6.24.7 Rate of Turn Damping Period
The SSC200/SSC300 is capable of transmitting the rate of turn of a vessel. Different applications may require different damping for the rate of turn measurement. The DSM410 may be used to set the damping period for the rate of turn measurement to anywhere between 0.1 seconds and 60 seconds. Figure 183 shows an example of the damping period set to 2 seconds.
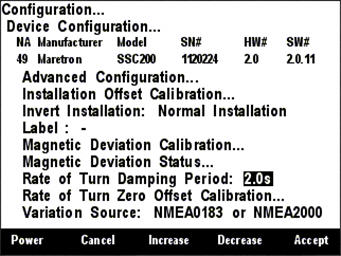
Figure 183 – Programming SSC200/SSC300 Rate of Turn Damping Period
6.24.8 Rate of Turn Zero Offset Calibration
The DSM410 is capable of displaying rate of turn information
from a Maretron SSC200/SSC300 compass. Although the compass provides very
accurate rate of turn information, it can drift off of zero even though the
vessel is not turning. Fortunately, the SSC200/SSC300 can learn the zero offset
for different conditions found on the vessel. You teach the compass these zero
offset values by pressing the Enter key (![]() ) with the
“Rate of Turn Zero Offset Calibration…” menu item selected which causes the DSM410
to display the screen shown in Figure 184. The Rate of Turn Offset Calibration
should be done before the Deviation Calibration (Section 6.24.5).
) with the
“Rate of Turn Zero Offset Calibration…” menu item selected which causes the DSM410
to display the screen shown in Figure 184. The Rate of Turn Offset Calibration
should be done before the Deviation Calibration (Section 6.24.5).
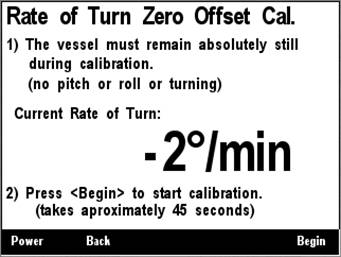
Figure 184 – SSC200/SSC300 Rate of Turn Zero Offset Calibration Screen
6.24.9 Variation Source Entry
The SSC200/SSC300, being a magnetic compass, transmits heading information referenced to the magnetic north pole (magnetic heading). The SSC200/SSC300 is capable of transmitting heading information referenced to the earth’s geographic North Pole (true heading). In order to produce true heading, information regarding the magnetic variation at the current location is required. Please see the SSC200/SSC300 User’s Manual for more details on the use of magnetic variation by the SSC200/SSC300 compass.
By default, the SSC200/SSC300 is capable of receiving variation information on either its NMEA 0183 or NMEA 2000® interfaces. This causes the SSC200/SSC300 to use variation data from either the NMEA 0183 interface or the NMEA 2000® interface.
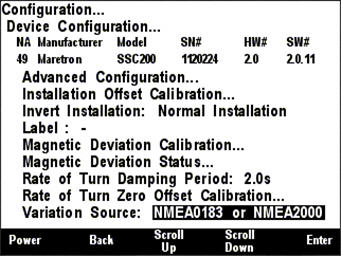
Figure 185 – Setting Variation Source to NMEA 0183 or NMEA 2000® (factory default)
You should need to alter this setting only if:
· There are variation sources available on both the NMEA 2000® and NMEA 0183 interfaces, or
· There is no magnetic variation source available.
If variation sources are available on both the NMEA 2000® and NMEA 0183 interfaces, you must tell the SSC200/SSC300 which source to use. Figure 186 below shows the NMEA 0183 source selected. This causes the SSC200/SSC300 to use variation data from the NMEA 0183 interface and ignore all other variation sources (i.e., NMEA 2000® interface and manual entries).
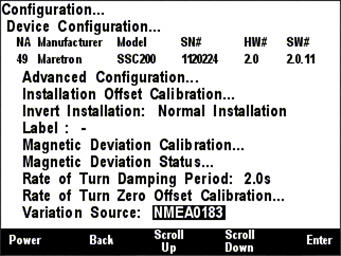
Figure 186 – Setting Variation Source to NMEA 0183 Only
Figure 187 below shows the NMEA 2000® source selected.
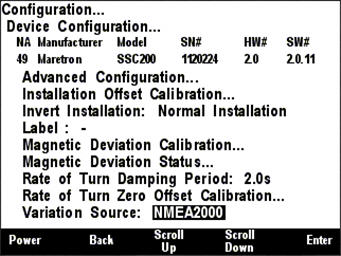
Figure 187 – Setting Variation Source to NMEA 2000® Only
If there is no magnetic variation source available on either
the NMEA 2000® or the NMEA 0183 interface, and you wish to display
true heading information, you may manually enter a magnetic variation. To set a
manual variation value, you must change the variation source by pushing the
Enter key (![]() ) with the “Variation Source:”
menu item selected. This highlights the next field where you select “Manual
Entry:” by scrolling (
) with the “Variation Source:”
menu item selected. This highlights the next field where you select “Manual
Entry:” by scrolling (![]() or
or ![]() ) through the
options until you reach “Manual Entry:”. Pressing the Enter key (
) through the
options until you reach “Manual Entry:”. Pressing the Enter key (![]() )
with the “Manual Entry:” menu item selected takes you to the screen shown in Figure 188.
)
with the “Manual Entry:” menu item selected takes you to the screen shown in Figure 188.
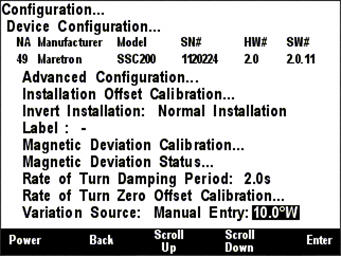
Figure 188 – Entering Manual Variation
Press the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) key
to change the amount of East or West variation. Press the Accept Key (
) key
to change the amount of East or West variation. Press the Accept Key (![]() ) when the desired number is shown. You may also disable manual
variation by setting the value to “Disable”; this option appears between the
values 0.0°E and 0.1°W when scrolling through the values. When manual variation
is disabled, the SSC200/SSC300 will not transmit any variation information and
heading information will be available only in magnetic heading format.
) when the desired number is shown. You may also disable manual
variation by setting the value to “Disable”; this option appears between the
values 0.0°E and 0.1°W when scrolling through the values. When manual variation
is disabled, the SSC200/SSC300 will not transmit any variation information and
heading information will be available only in magnetic heading format.
WARNING: Magnetic variation changes as your location on the earth changes; therefore magnetic variation should be adjusted with changes in position. Neither the DSM410 nor the SSC200/SSC300 will make these changes automatically; they are the responsibility of the user.
6.25 Maretron TLA100 Configuration
Maretron TLA100 tank level adapters on the network may be configured using the DSM410. This describes the configuration of the Maretron TLA100 firmware version 1.6.15. The TLA100 configuration menu is shown in Figure 189 below.
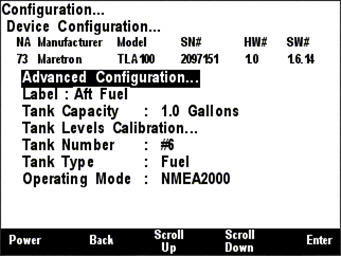
Figure 189 – TLA100 Configuration Screen
6.25.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
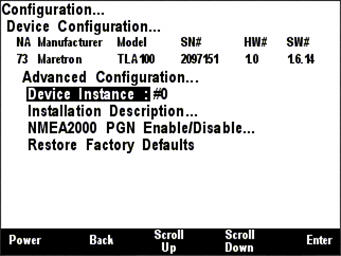
Figure 190 – TLA100 Advanced Configuration Screen
6.25.1.1 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.25.1.2 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later. See Section 3.3.4 for details on how to enter a textual value.
6.25.1.3 NMEA2000 PGN Enable/Disable
The TLA100 Tank Level Adapter transmits the NMEA2000 PGN #127505 which can be turned on or turned off by the DSM410 display. Pressing the Enter key with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410 to display the following screen (Figure 191).
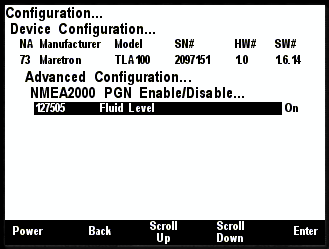
Figure 191 – TLA100 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable the transmission of the Fluid Level
message, or set the frequency of transmission of the message by pressing the
Enter key (![]() ) on the message to be configured. Options are:
) on the message to be configured. Options are:
· Off – The status message will not be transmitted
· On – The status message will be transmitted at its default NMEA2000 rate.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.25.1.4 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.25.2 Label
See Section 3.3.4 for details on how to enter a textual value.
6.25.3 Tank Capacity
In order for the TLA100 to produce readings of the amount of fluid remaining in the tank, the tank capacity must be programmed into the TLA100 adapter. Figure 192 below shows a screen shot of the tank capacity being configured.
To program the tank capacity, use the Scroll Up (![]() ) or Scroll
Down (
) or Scroll
Down (![]() ) keys to move the highlighted
cursor over the “Tank Capacity:” menu item. Then, press the Enter key (
) keys to move the highlighted
cursor over the “Tank Capacity:” menu item. Then, press the Enter key (![]() ) to move the highlight over the numerical tank capacity value. Use the
“Increase” and “Decrease” keys to change the value to the desired tank capacity
value, and finally, press the Enter key (
) to move the highlight over the numerical tank capacity value. Use the
“Increase” and “Decrease” keys to change the value to the desired tank capacity
value, and finally, press the Enter key (![]() ) to confirm
your selection and store the value within the TLA100.
) to confirm
your selection and store the value within the TLA100.
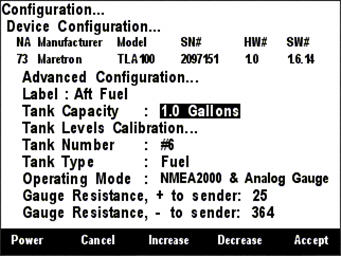
Figure 192 – Configuring the Tank Capacity
After you have pressed the Enter key (![]() ), a
confirmation screen will appear that warns you that the fluid remaining
measurement will change as a result of this change. Press the Accept key to
accept the change and store the new tank capacity value within the TLA100, or
Press the Cancel Key (
), a
confirmation screen will appear that warns you that the fluid remaining
measurement will change as a result of this change. Press the Accept key to
accept the change and store the new tank capacity value within the TLA100, or
Press the Cancel Key (![]() ) to cancel the change and leave
the old tank capacity programmed into the TLA100.
) to cancel the change and leave
the old tank capacity programmed into the TLA100.
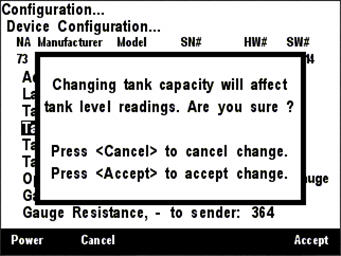
Figure 193 – Tank Capacity Change Confirmation Screen
6.25.4 Tank Levels Calibration
In order for the TLA100 to indicate an accurate tank level, it must know how the resistance of the resistive tank level sender corresponds to the level of fluid in the tank. There are three methods of calibrating the tank level sender:
· Custom Calibration – use for non-rectangular tanks or non-standard sensors (also, most accurate in any case, but requires more effort)
· Set to American Standard (240-33 ohm) – use for rectangular tanks using a tank level sender with the standard American resistance range (240 ohms at full, 33 ohms at empty).
· Set to European Standard (0-180 ohm) – use for rectangular tanks using a tank level sender with the standard European resistance range (0 ohms at full, 180 ohms at empty).
6.25.4.1 Custom Calibration
The Custom Calibration setting will provide the most
accurate tank level readings under any circumstances, but it requires that you
go through a process in which you gradually fill the tank, stopping
periodically to input the current fluid level. The TLA100 will measure the
sender resistance at each point and create a custom calibration map which
relates the resistance of the sender with the fluid levels. Figure
194 below shows a screenshot of the DSM410 with the Custom Calibration option
highlighted. Custom calibration is necessary for non-rectangular tanks and for
non-standard values of resistances for tank level senders. To perform custom
calibration of the tank level sender, use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to
move the highlighted cursor over the “Custom Calibration…” menu item. Then,
press the Enter key (
) keys to
move the highlighted cursor over the “Custom Calibration…” menu item. Then,
press the Enter key (![]() ) to confirm your selection and
begin the calibration process.
) to confirm your selection and
begin the calibration process.
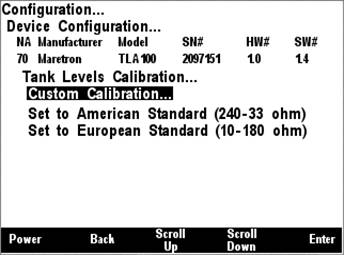
Figure 194 – Performing Custom Calibration of the Tank Level Adapter
The first step in custom calibration of the tank level
sender is to provide an estimated capacity of the tank. This estimated capacity
must be within +/- 25% of the actual capacity. To set the estimated tank
capacity, use the arrow keys to adjust the displayed value until the desired
value is shown. Then, press the Accept key to confirm your selection and
continue with the calibration process. If you desire to stop the calibration
process, pressing the Back Key (![]() ) will end the process and
return you to the Tank Levels Calibration menu.
) will end the process and
return you to the Tank Levels Calibration menu.
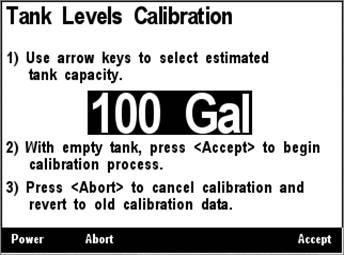
Figure 195 – Tank Levels Calibration Capacity Estimation
The next step in the calibration process is to fill the tank and indicate the volume of fluid in the tank at various points while filling the tank. This process should be started with an empty tank. You only need to indicate two calibration points for a rectangular tank, and can use up to 16 calibration points for a tank with a more complex shape. Figure 196 shows a screenshot of the first calibration step. Enter the first calibration point with an empty tank (0.0 Gallons/liters) by pressing the Accept key. The “Current Point” highlight will advance to the next point.
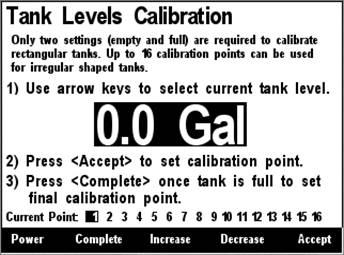
Figure 196 – Empty Level Calibration
Each time you press Accept during this process and after the Current Point highlight advances, put more fluid into the tank, and note the total volume of fluid pumped into the tank at this point. Use the Increase and Decrease keys to set the current tank level to the appropriate value, and then press the Accept key to store the current calibration point and advance to the next calibration point. Figure 197 shows a screenshot of these intermediate calibration points.
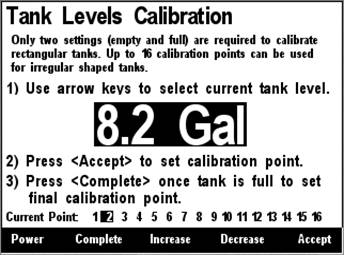
Figure 197 – Intermediate Level Calibration
Once the tank is completely full, instead of pressing the Accept key to store the current calibration point, press the Complete key. This will complete the calibration process and will also adjust the tank capacity to the currently indicated level. Figure 198 below shows the calibration screen at the last point with the full tank level (and thus the tank capacity) set to 101 gallons.
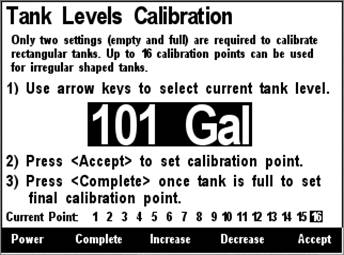
Figure 198 – Full Level Calibration
After you press accept, a confirmation screen will appear showing completion of the calibration process and the new tank capacity value. A screenshot of this calibration screen is shown below in Figure 199.
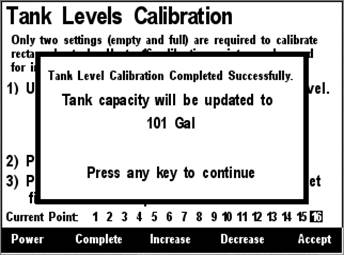
Figure 199 – Custom Tank Level Calibration Confirmation Screen
6.25.4.2 American Standard Sender Calibration
If you have a rectangular tank, and a sender with the
standard American resistance range (240 ohms full, 33 ohms empty), and you know
the capacity of the tank, you can easily calibrate the sender by using the “Set
to American Standard (240-33 ohm)” menu item. Figure 200 below shows this option
highlighted. Use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to move the
highlight over this menu item, and then press the Enter key (
) keys to move the
highlight over this menu item, and then press the Enter key (![]() ) to write the
calibration values within the TLA100 and complete the calibration process.
) to write the
calibration values within the TLA100 and complete the calibration process.
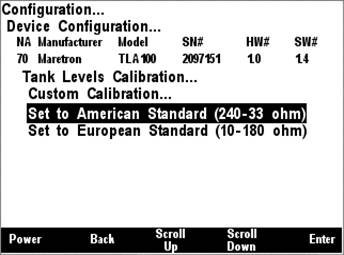
Figure 200 – American Standard Sender Calibration
6.25.4.3 European Standard Sender Calibration
If you have a rectangular tank, and a sender with the
standard European resistance range (0 ohms full, 180 ohms empty), and you know
the capacity of the tank, you can easily calibrate the sender by using the “Set
to European Standard (0-180 ohm)” menu item. Figure
201 below shows this option highlighted. Use the Scroll Up (![]() ) or
Scroll Down (
) or
Scroll Down (![]() ) keys to move the highlight
over this menu item, and then press the Enter key (
) keys to move the highlight
over this menu item, and then press the Enter key (![]() ) to store the
calibration values within the TLA100 and complete the calibration process.
) to store the
calibration values within the TLA100 and complete the calibration process.
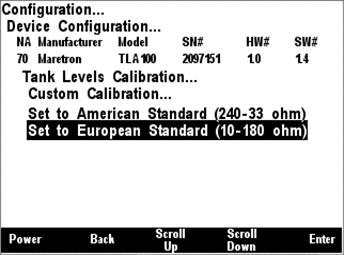
Figure 201 – European Standard Sender Calibration
6.25.5 Tank Number
Next, the tank number must be configured. A tank number can
have a value between 0 and 15. Each tank of a particular type must have a tank
number that is different from all other tanks of the same type. For instance,
only one TLA100 on a fuel tank may have tank number equal to “0”. A screenshot
of tank number configuration is shown in Figure 202 below. In order to configure
the tank number, use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() )
keys to move the highlighted cursor to “Tank Number:”, then press the Enter key
(
)
keys to move the highlighted cursor to “Tank Number:”, then press the Enter key
(![]() ) to move the cursor over to the
tank number value. Use the Scroll Up (
) to move the cursor over to the
tank number value. Use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() )
keys to select the desired tank number. Finally, press the Enter key (
)
keys to select the desired tank number. Finally, press the Enter key (![]() ) to confirm your selection and store the new tank number within the
TLA100.
) to confirm your selection and store the new tank number within the
TLA100.
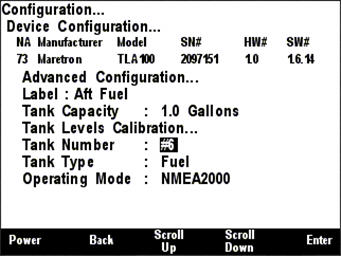
Figure 202 – Configuring the Tank Number
6.25.6 Tank Type
The TLA100 can be used in tanks containing any of a number
of different types of fluids. So that network-connected monitoring devices can
determine easily what sort of fluid is in the monitored tank, the TLA100 must
be programmed to indicate the fluid type it is monitoring. Figure
203 below shows a screen shot of the tank type being configured. First, use the
Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() )
keys to position the highlighted cursor over “Tank Type:”, then press the Enter
key (
)
keys to position the highlighted cursor over “Tank Type:”, then press the Enter
key (![]() ) to move the highlight to the
tank type data itself. Now, use the Scroll Up (
) to move the highlight to the
tank type data itself. Now, use the Scroll Up (![]() ) or Scroll
Down (
) or Scroll
Down (![]() ) keys to change the tank type
data to the type desired. Finally, press the Enter key (
) keys to change the tank type
data to the type desired. Finally, press the Enter key (![]() ) to
confirm the selection and store the value within the TLA100.
) to
confirm the selection and store the value within the TLA100.
Available tank types are as follows:
· Fuel
· Fresh Water
· Waste Water
· Live Well
· Oil
· Black Water
There are also a number of reserved tank types to accommodate possible future undefined tank types.
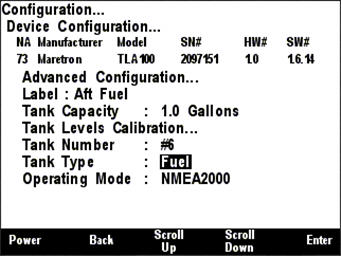
Figure 203 – Configuring the Tank Type
6.25.7 Operating Mode
The TLA100 can be operated in one of two operating modes, depending on the installation.
· NMEA 2000 (the only thing that is connected to the resistive sender is the TLA100)
· NMEA 2000 & Analog Gauge (in addition to the TLA100, the resistive sender is also connected to a dual-coil analog gauge).
It is important that this setting be performed correctly in
order for the TLA100 to produce correct level measurements. A screenshot
showing configuration of the operating mode appears in Figure 204 below. To
configure the operating mode, use the Scroll Up (![]() ) or Scroll
Down (
) or Scroll
Down (![]() ) keys to move the highlighted
cursor over the “Operating Mode:” menu item, then press the Enter key (
) keys to move the highlighted
cursor over the “Operating Mode:” menu item, then press the Enter key (![]() ) to move the highlight over the operating mode value. Use the Scroll Up
(
) to move the highlight over the operating mode value. Use the Scroll Up
(![]() ) or Scroll Down (
) or Scroll Down (![]() )
keys to change the operating mode to the desired value, and finally, press the
Entry key to confirm your selection and store the operating mode within the
TLA100.
)
keys to change the operating mode to the desired value, and finally, press the
Entry key to confirm your selection and store the operating mode within the
TLA100.
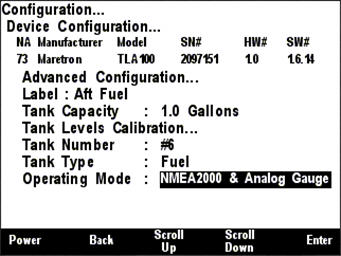
Figure 204 – Configuring the Operating Mode
6.25.8 Gauge Resistance, + to Sender
If the desired operating mode is “NMEA 2000 & Analog
Gauge”, the two gauge resistances must be programmed (please refer to the TLA100
User’s Manual for details on how to perform these measurements). A
screenshot of the + to sender gauge resistance configuration is shown in Figure 205 below. To program the + to sender gauge resistance, use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to move the highlighted
cursor over the “Gauge Resistance, + to Sender:” menu item. Then, press the
Enter key (
) keys to move the highlighted
cursor over the “Gauge Resistance, + to Sender:” menu item. Then, press the
Enter key (![]() ) to move the highlight over the
numerical resistance value. Use the “Increase” and “Decrease” keys to change
the value to the measured resistance value, and finally, press the Enter key (
) to move the highlight over the
numerical resistance value. Use the “Increase” and “Decrease” keys to change
the value to the measured resistance value, and finally, press the Enter key (![]() ) to confirm your selection and store the value within the TLA100.
) to confirm your selection and store the value within the TLA100.
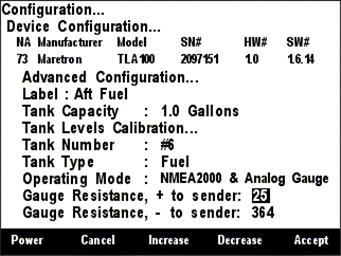
Figure 205 – Configuring the + to Sender Gauge Resistance
6.25.9 Gauge Resistance, - to Sender
If the desired operating mode is “NMEA 2000 & Analog Gauge”, the two gauge resistances must be programmed (please refer to the TLA100 User’s Manual for details on how to perform these measurements). A screenshot of the - to sender gauge resistance configuration is shown in Figure 206 below.
To program the - to sender gauge resistance, use the Scroll
Up (![]() ) or Scroll Down (
) or Scroll Down (![]() )
keys to move the highlighted cursor over the “Gauge Resistance, - to Sender:”
menu item. Then, press the Enter key (
)
keys to move the highlighted cursor over the “Gauge Resistance, - to Sender:”
menu item. Then, press the Enter key (![]() ) to move the highlight over the
numerical resistance value. Use the “Increase” and “Decrease” keys to change
the value to the measured resistance value, and finally, press the Enter key (
) to move the highlight over the
numerical resistance value. Use the “Increase” and “Decrease” keys to change
the value to the measured resistance value, and finally, press the Enter key (![]() ) to confirm your selection and store the value within the TLA100.
) to confirm your selection and store the value within the TLA100.
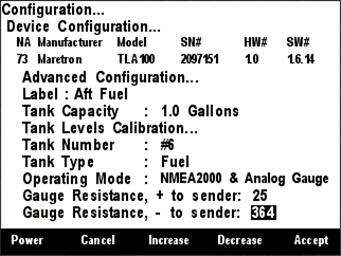
Figure 206 – Configuring the - to Sender Gauge Resistance
6.26 Maretron TLM100 Configuration
The DSM410 may be used to configure and calibrate the Tank Level Monitor (TLM100 / TLM150 / TLM200). This describes the configuration of firmware version 1.1.6. After selecting the TLM100 from the list of devices on the network, the following screen will be displayed.
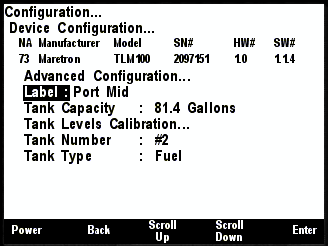
Figure 207 – TLM100 Configuration Screen
6.26.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
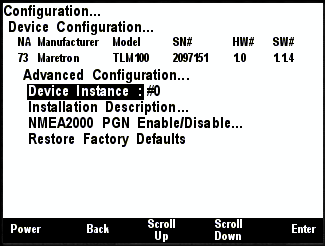
Figure 208 – TLM100 Advanced Configuration Screen
6.26.1.1 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.26.1.2 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later.
6.26.1.3 NMEA2000 PGN Enable/Disable
The TLM100 Tank Level Module transmits the NMEA2000 PGN #127505 which can be turned on or turned off by the DSM410 display. Pressing the Enter key with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410 to display the following screen (Figure 209).
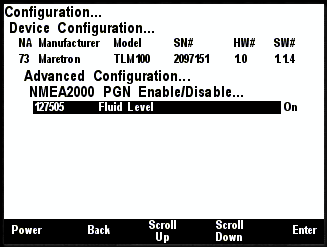
Figure 209 – TLM100 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable the transmission of the Binary
Switch Status message by pressing the Enter key (![]() ) on the message to be
configured. Options are:
) on the message to be
configured. Options are:
Off – The fluid level message will not be transmitted
On – The fluid level message will be transmitted at its default NMEA2000 rate, which is once every 2.5 seconds.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.26.1.4 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.26.2 Label
A label may be assigned to the TLM100 as an aid to identifying the device over the network. Typically this label will describe the location of the TLM100, and a description of the contents of the tank.
6.26.3 Tank Capacity
In order for the TLM100 to produce readings of the amount of fluid remaining in the tank, the tank capacity must be programmed into the TLM100 adapter. Figure 210 below shows a screen shot of the tank capacity being configured. To program the tank capacity, use the Scroll Up or Scroll Down keys to move the highlighted cursor over the “Tank Capacity:” menu item. Then, press the Enter key to move the highlight over the numerical tank capacity value. Use the Increase and Decrease keys to change the value to the desired tank capacity value, and finally, press the Accept key to confirm your selection.
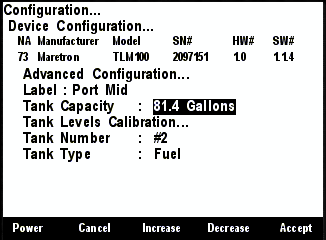
Figure 210 – Configuring the Tank Capacity
After you have pressed the Accept key, a confirmation screen will appear that warns you that the fluid remaining measurement will change as a result of this change. Press the Accept key to accept the change and store the new tank capacity value within the TLM100, or Press the Cancel Key to cancel the change and leave the old tank capacity programmed into the TLM100.
Figure 211 – Tank Capacity Change Confirmation Screen
6.26.4 Tank Levels Calibration
In order for the TLM100 to indicate an accurate tank level, it must know the geometry of the tank. There are two methods of calibrating the tank level sender:
· Custom Calibration – use for non-rectangular tanks (also, most accurate in any case, but requires more effort)
· Rectangular Tank – By inputting some dimensions of a rectangular tank, the TLM100 is able to interpolate the volume of liquid from the distance to the surface.
6.26.4.1 Custom Calibration
The Custom Calibration setting will provide the most
accurate tank level readings under any circumstances, but it requires that you
go through a process in which you gradually fill the tank, stopping
periodically to input the current fluid level. The TLM100 will measure the
distance to the surface at each point and create a custom calibration map which
relates the fluid levels to the volume in the tank. Figure 194 below shows a
screenshot of the DSM410 with the Custom Calibration option highlighted. Custom
calibration is necessary for non-rectangular tanks. To perform custom
calibration of the tank level sender, use the Scroll Up (![]() ) or
Scroll Down (
) or
Scroll Down (![]() ) keys to move the highlighted
cursor over the “Custom Calibration…” menu item. Then, press the Enter key (
) keys to move the highlighted
cursor over the “Custom Calibration…” menu item. Then, press the Enter key (![]() ) to confirm your selection and begin the calibration process.
) to confirm your selection and begin the calibration process.
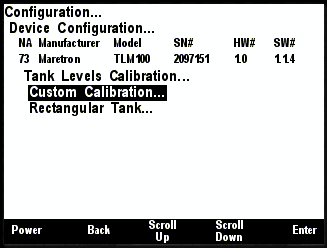
Figure 212 – Performing Custom Calibration of the Tank Level Monitor
The first step in custom calibration of the tank level
monitor is to provide an estimated capacity of the tank. This estimated
capacity must be within +/- 25% of the actual capacity. To set the estimated
tank capacity, use the Increase and Decrease keys to adjust the
displayed value until the desired value is shown. Then, press the Accept
key to confirm your selection and continue with the calibration process. If you
desire to stop the calibration process, pressing the Abort key (![]() ) will end the process and return you to the Tank Levels Calibration
menu.
) will end the process and return you to the Tank Levels Calibration
menu.
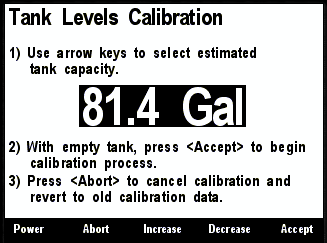
Figure 213 – Tank Levels Calibration Capacity Estimation
The next step in the calibration process is to fill the tank and indicate the volume of fluid in the tank at various points while filling the tank. This process should be started with an empty tank. You only need to indicate two calibration points for a rectangular tank, and can use up to 16 calibration points for a tank with a more complex shape. Figure 214 shows a screenshot of the first calibration step. Enter the first calibration point with an empty tank (0.0 Gallons/liters) by pressing the Accept key. The “Current Point” highlight will advance to the next point.
Figure 214 – Empty Level Calibration
Each time you press Accept during this process and after the Current Point highlight advances, put more fluid into the tank, and note the total volume of fluid pumped into the tank at this point. Use the Increase and Decrease keys to set the current tank level to the appropriate value, and then press the Accept key to store the current calibration point and advance to the next calibration point. Figure 215 shows a screenshot of these intermediate calibration points.
Figure 215 – Intermediate Level Calibration
Once the tank is completely full, instead of pressing the Accept key to store the current calibration point, press the Complete key. This will complete the calibration process and will also adjust the tank capacity to the currently indicated level. Figure 216 below shows the calibration screen at the last point with the full tank level (and thus the tank capacity) set to 101 gallons.
Figure 216 – Full Level Calibration
After you press accept, a confirmation screen will appear showing completion of the calibration process and the new tank capacity value. A screenshot of this calibration screen is shown below in Figure 217.
Figure 217 – Custom Tank Level Calibration Confirmation Screen
6.26.4.2 Rectangular Tank
If you have a rectangular tank, and you know the capacity of
the tank, you can easily calibrate the sender by using the “Rectangular Tank”
menu item. Figure 218 below shows this option highlighted. Use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to move the highlight
over this menu item, and then press the Enter key (
) keys to move the highlight
over this menu item, and then press the Enter key (![]() ).
).
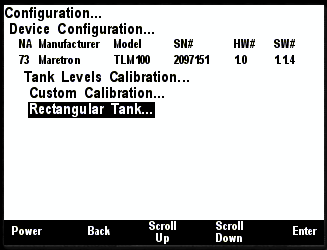
Figure 218 – Rectangular Tank Selection
The following screen will be displayed.
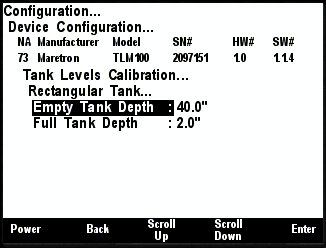
Figure 219 – Rectangular Tank Calibration
Enter the distance from the face of the TLM100 sensor to the bottom of the tank for the Empty Tank Depth, and the distance from the face of the TLM100 sensor to the top of the liquid when the tank is full for the Full Tank Depth.
After entering the values, use the Back button to return the parent menu.
6.26.5 Tank Number
The Tank Number is the Data Instance used in the data message. This can be set from #0 to #15.
6.26.6 Tank Type
This is set to the type of fluid in the tank. Values are:
· Fuel
· Fresh Water
· Waste Water
· Live Well
· Oil
· Black Water
· Reserved-1..Reserved-7 – These values may be used when the contents of the tank does not fit into one of the categories above.
6.27 Maretron TLM150 Configuration
The TLM150 is the gasoline version of the TLM100. The configuration of the two devices is the same; see Section 6.26 for details.
6.28 Maretron TLM200 Configuration
The TLM200 is the deep tank version of the TLM100. The configuration of the two devices is the same; see Section 6.26 for details.
6.29 Maretron TMP100 Configuration
Maretron Temperature Modules (TMP100) may be configured using the DSM410. This describes the configuration of the Maretron TMP100 firmware version 1.1.1. The top level of the TMP100 configuration menu is shown below.
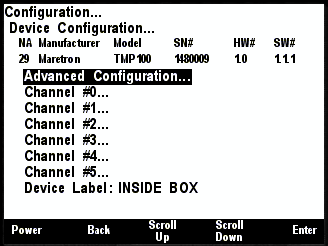
Figure 220 – TMP100 Configuration Screen
6.29.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
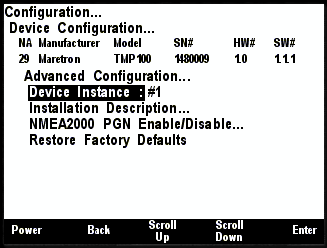
Figure 221 – TMP100 Advanced Configuration Screen
6.29.1.1 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.29.1.2 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later.
6.29.1.3 NMEA2000 PGN Enable/Disable
The TMP100 Temperature Module transmits a number of the NMEA2000® PGNs which can be turned on or turned off by the DSM410 display. For reasons of compatibility with older NMEA2000 devices, some of these PGNs are redundant; disabling these PGNs will reduce the amount of traffic on the NMEA2000® bus. Pressing the Enter key with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410 to display the following screen (Figure 222).
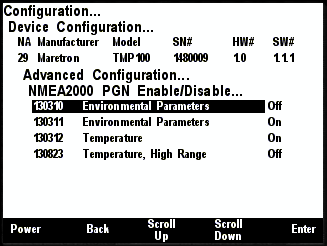
Figure 222 – TMP100 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable the transmission of a PGN message,
or set the frequency of transmission of the message by pressing the Enter key (![]() ) on the
message to be configured. Options are:
) on the
message to be configured. Options are:
Off – The PGN will not be transmitted
On – The PGN will be transmitted at its default NMEA2000 rate.
0.5s…5s – The PGN will be transmitted at the interval specified.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
6.29.1.4 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.29.2 Channel Configuration
Individual channels may be configured by using the Scroll Up and Scroll Down buttons to highlight the channel, and then pressing the Enter key. The following screen will be displayed.
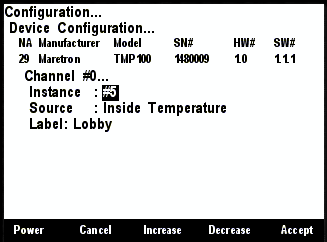
Figure 223 – TMP100 Channel Configuration Screen
6.29.2.1 Instance
The Data Instance of the Temperature (as sent in PGNs 130311, 130312, and 130823) is set in this field. Use the Increase and Decrease buttons to select the correct instance number, and the press the Enter button to store it.
6.29.2.2 Source
In the NMEA2000® PGNs, each temperature is associated with a source type. Possible values are:
Bait Well Temperature
Engine Room Temperature
Exhaust Gas Temperature
Freezer Temperature
Heating System Temperature
Inside Temperature
Live Well Temperature
Main Cabin Temperature
Outside Temperature
Refrigeration Temperature
Sea Temperature
User Defined Temperature #129...#144 – Use this when none of the above options are suitable.
Use the Scroll Up and Scroll Down buttons to select the correct source, and the press the Enter button to store it.
6.29.2.3 Label
A label may be assigned to each channel of the TMP100 as an aid to identifying the temperature that is being displayed. Typically this label will describe the function or location of the temperature sensor.
6.29.3 Device Label
A label may be assigned to the TMP100 as an aid to identifying the device over the network. Typically this label will describe the location of the TMP100.
6.30 Maretron USB100 Configuration
Maretron USB100 gateways on the network may be configured using the DSM410. This describes the configuration of the Maretron USB100 firmware version 1.8.3. The USB100 configuration menu is shown in Figure 224 below. There is one configurable item for the USB100 and that is “Remote Device Selection…”.
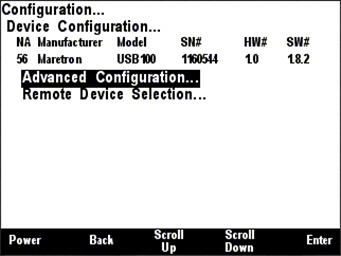
Figure 224 – USB100 Configuration Screen
6.30.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
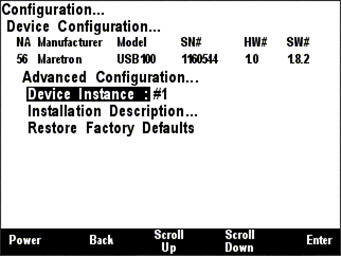
Figure 225 – USB100 Advanced Configuration Screen
6.30.1.1 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.30.1.2 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later.
6.30.1.3 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.30.2 Remote Device Selection
The Maretron NMEA 2000® to NMEA 0183 gateway (USB100) can be configured to select which NMEA 2000® devices are selected for display on the computer attached to the USB interface of the USB100. In this manner, multiple devices of the same type may be used on a NMEA 2000® network in a fail-safe configuration. The USB100 Device Selection Menu for an example network configuration can be seen in Figure 226.
WARNING: Do not select multiple devices of the same type for display. This will result in multiple and possibly conflicting readings.
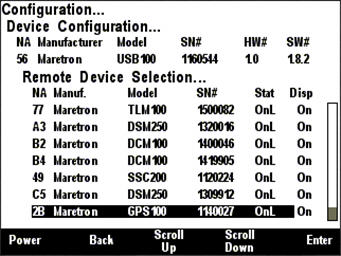
Figure 226 – USB100 Device Selection Screen
The “NA” column of the menu displays the node address the device is using.
The “Manuf.” column of the menu displays the manufacturer of the device.
The “Model” column displays the model number of the device.
The “SN#” column displays the serial number of the device, so that any of two or more devices of the same manufacturer and model number may be distinguished from one another.
The “Stat” column indicates whether the device is currently connected to the bus and is responding to queries (“Online”), or has been disconnected from the bus, has lost power, or for some other reason is not responding to queries (“Offline”).
The “Disp” column indicates whether data from that
particular device is accepted for display by the USB100 (“On”) or that the
USB100 ignores data transmitted by this device (“Off”). By scrolling to the
device and pressing the Enter key (![]() ), you may then use the Scroll
Up (
), you may then use the Scroll
Up (![]() ) and Scroll Down (
) and Scroll Down (![]() ) keys to
toggle the “Display” status for this particular device. Once you are satisfied
with the state of the “Display” setting, press the Enter key (
) keys to
toggle the “Display” status for this particular device. Once you are satisfied
with the state of the “Display” setting, press the Enter key (![]() ) to
accept the setting. The USB100 will retain information on devices that have
been removed from the bus or powered down (“Offline”) so that when they are
placed back on the bus, they will assume their prior “Display” setting.
) to
accept the setting. The USB100 will retain information on devices that have
been removed from the bus or powered down (“Offline”) so that when they are
placed back on the bus, they will assume their prior “Display” setting.
6.31 Maretron VDR100 Configuration
The DSM410 is capable of performing configuration of the VDR100 Vessel Data Recorder. This describes the configuration of the Maretron VDR100 firmware version 2.0.0.4. Figure 227 below shows a screenshot of the VDR100 configuration menu.
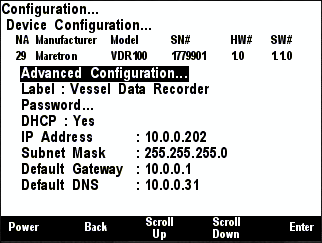
Figure 227 – VDR100 Configuration Screen
6.31.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
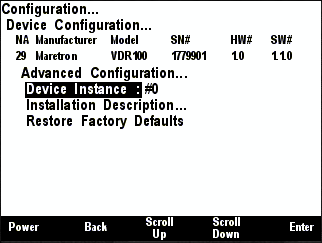
Figure 228 – VDR100 Advanced Configuration Screen
1.1.2.4 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network.
6.31.1.1 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later.
6.31.1.2 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.31.2 Label
A device label may be assigned to the VDR100 as an aid to identifying the device over the network. See Section 3.3.4 for details on how to enter a textual value.
6.31.3 Password
Program this parameter with a text password. Any connecting N2KExtractor™ clients must be programmed with the same password in the “Connections Settings->Password” field in the N2KExtractor™ software. The default password is blank.
6.31.4 DHCP
This parameter determines whether or not the VDR100 obtains its LAN connection settings from a DHCP server on the local area network. When set to “Yes” (the default value), the VDR100 will obtain all necessary connection settings (IP Address, Subnet Mask, Default Gateway, and Default DNS) from a DHCP server on the local area network. Most routers have the capability to act as a DHCP server. Consult the user documentation for your network’s router for details.
If there is no DHCP server on the local area network (or if the VDR100 is connected directly to a PC running N2KExtractor™), set the “DHCP” parameter to “No” and manually configure the IP Address (Section 6.17.6), Subnet Mask (Section 6.17.7), Default Gateway (Section 6.17.8), Default DNS (Section 6.17.9).
6.31.5 IP Address
This parameter is the IP (Internet Protocol) address used by the VDR100. You will need to specify this address to N2KExtractor™ clients in order to allow them to connect to the VDR100. If the “DHCP” parameter is set to “Yes”, you do not need to configure this parameter. If the “DHCP” parameter is set to “No”, you will need to configure this parameter.
6.31.6 Subnet Mask
This is a mask used to divide an IP Address into subnets. Basically, it tells the computer how much of the IP Address defines the network, and how much may be used by computers on the network. For most networks, the first three parts of the IP address define the network (i.e., every computer on the network must have the same values), and the last part defines the computer (i.e., every computer on the network must have a different value). Where the value 255 appears in the subnet mask, the values define the network and must be the same.
The most common value is 255.255.255.0.
If the “DHCP” parameter is set to “Yes”, you do not need to configure this parameter. If the “DHCP” parameter is set to “No”, you will need to configure this parameter.
6.31.7 Default Gateway
This is the IP address of the router. If the “DHCP” parameter is set to “Yes”, you do not need to configure this parameter. If the “DHCP” parameter is set to “No”, you will need to configure this parameter.
6.31.8 Default DNS
This is the IP address of a computer on the Internet that can identify and locate computer systems and resources on the internet. In most cases, this should not be required by the VDR100 and may be left blank. If the “DHCP” parameter is set to “No”, you will need to configure this parameter.
6.32 Maretron WSO100 Configuration
The DSM410 is capable of performing configuration of the WSO100 Wind/Weather Sensor. This describes the configuration of the Maretron WSO100 firmware version 2.0.13. Figure 229 below shows a screenshot of the WSO100 configuration menu.
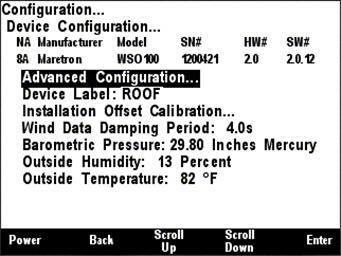
Figure 229 – WSO100 Configuration Screen
6.32.1 Advanced Configuration
Advanced Configuration changes some complex parameters within the device, and should only be performed by an advanced user. Typically advanced configuration is only done at installation and should not need to be done while at sea.
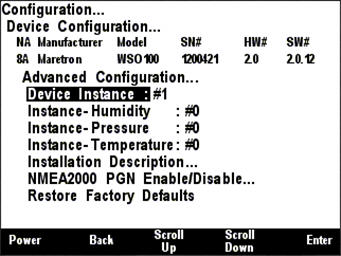
Figure 230 – WSO100 Advanced Configuration Screen
6.32.1.1 Device Instance
This entry allows you to program the NMEA 2000 device instance for the unit. You usually will not need to modify the default value of “0” unless you have multiple units on the network. Device instance is always used in the Wind PGNs.
6.32.1.2 Instance – Humidity
This entry allows you to program the NMEA 2000 device instance for the humidity transmitted in PGN 130313. You usually will not need to modify the default value of “0” unless you have multiple humidity sensors on the network.
6.32.1.3 Instance – Pressure
This entry allows you to program the NMEA 2000 device instance for the air pressure transmitted in PGN 130314. You usually will not need to modify the default value of “0” unless you have multiple pressure sensors on the network.
6.32.1.4 Instance – Temperature
This entry allows you to program the NMEA 2000 device instance for the temperature transmitted in PGN 130312. You usually will not need to modify the default value of “0” unless you have multiple temperature sensors on the network. Note that the TMP100 module also generates these PGNs.
6.32.1.5 Installation Description
This entry allows you to modify the NMEA 2000 installation description text strings. You can enter any information you like here, such as the date the unit was installed, or the location in which it was installed, for later reference. Tools such as Maretron N2KAnalyzer allow you to view these values later.
6.32.1.6 NMEA2000 PGN Enable/Disable
The WSO100 Ultrasonic Wind and Weather Station transmits a number of NMEA2000 PGNs which can be turned on or turned off by the DSM410 display. For the vast majority of installations, the factory setting is appropriate, but if it becomes necessary to disable one of the transmitted messages from the WSO100, for instance, if you have a separate thermometer / humidity sensor / barometer on the network, it is possible to do so with the DSM410.Pressing the Enter key with “NMEA2000 PGN Enable/Disable…” menu item selected causes the DSM410 to display the following screen (Figure 231).
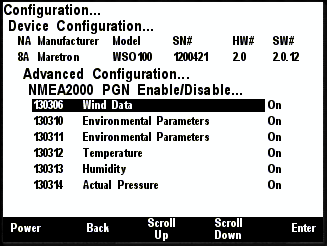
Figure 231 – WSO100 NMEA 2000® PGN Enable/Disable Screen
You can enable or disable the transmission of the messages by
pressing the Enter key (![]() ) on the message to be
configured. Options are:
) on the message to be
configured. Options are:
Disable – The message will not be transmitted
Default – The message will be transmitted at its default NMEA2000 rate.
0.5s…5.0s – The message will be transmitted at the interval specified.
Select the required option using the Scroll Up and Scroll Down keys followed by the Enter key.
Notice that by default, the old Environmental Parameters message (PGN 130310) is disabled while the new Environmental Parameters message (PGN 130311) is enabled. The reason for this is that the old message has been discontinued by the National Marine Electronics Association (NMEA) in favor of the new message. If you find that a particular display is not showing particular information (i.e., temperature, humidity, or barometric pressure), go ahead and enable the old message to see if data then becomes available.
6.32.1.7 Restore Factory Defaults
This option restores all settings on the device to their factory default state.
6.32.2 Device Label
A device label may be assigned to the WSO100 as an aid to identifying the device over the network. See Section 3.3.4 for details on how to enter a textual value.
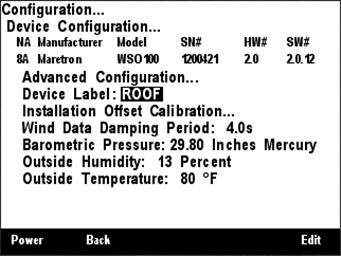
Figure 232 – WSO100 Device Label Menu
6.32.3 Installation Offset Calibration
The WSO100 comes from the factory with a preset orientation, so that mounting it with the orientation marks facing the bow of the vessel, the sensor will read 0° apparent wind angle when the vessel is sailing directly into the wind (please refer to the WSO100 User’s Manual for details).
However, the WSO100 can be installed in any orientation with
respect to the vessel and any misalignment with respect to the factory preset
can be easily compensated for using the Installation Offset calibration menu
item. To perform installation offset calibration, use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to move the highlighted cursor
to the “Installation Offset Calibration…” menu item, and then press the Enter
key (
) keys to move the highlighted cursor
to the “Installation Offset Calibration…” menu item, and then press the Enter
key (![]() ). The Installation Offset
screen then appears, which is shown in Figure 233 below.
). The Installation Offset
screen then appears, which is shown in Figure 233 below.
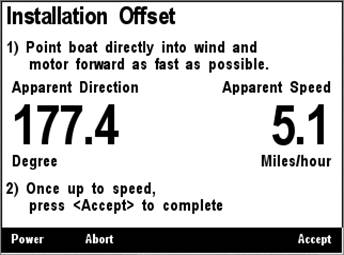
Figure 233 – WSO100 Installation Offset Screen
Turn the vessel directly into the wind and motor forward. When you are satisfied that the apparent wind is directly on the bow of the vessel, press the Accept key to set this angle to read 0° apparent wind on the WSO100. The WSO100 will only calibrate if the apparent wind speed is greater than 2.2 miles/hour. If the apparent wind speed is lower than this, then an error message will appear, which is shown in Figure 234 below, and the calibration process will be aborted.
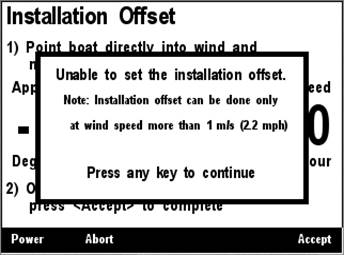
Figure 234 – WSO100 Configuration Aborted Due to Low Wind Speed
If the wind speed is sufficient, then a confirmation screen, shown in Figure 235 below, will appear, indicating that a successful installation offset calibration has completed.
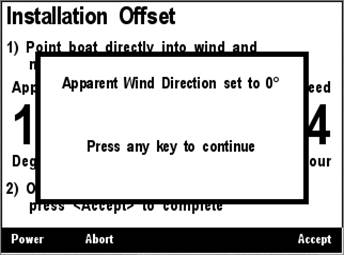
Figure 235 – Installation Offset Success Confirmation Screen
You may instead abort calibration by pressing the Abort Key
(![]() ). If you do this, the
installation offset calibration process will be aborted and a message will
appear noting that this has happened, which appears in Figure 236 below.
). If you do this, the
installation offset calibration process will be aborted and a message will
appear noting that this has happened, which appears in Figure 236 below.
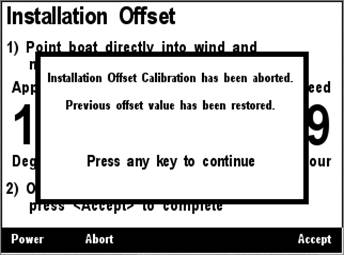
Figure 236 – Installation Offset Abort Confirmation Screen
6.32.4 Wind Data Damping Period
The WSO100 comes from the factory preset with a damping
period of 1.5 seconds, which should be appropriate for most applications.
However, you may use the DSM410 to tune the damping period to anywhere between
0.1 seconds and 5.0 seconds if you desire. To do this, use the Scroll Up (![]() ) or Scroll Down (
) or Scroll Down (![]() ) keys to move the highlighted
cursor to the “Wind Data Damping Period:” menu item, then press the Enter key (
) keys to move the highlighted
cursor to the “Wind Data Damping Period:” menu item, then press the Enter key (![]() ) to move the highlight to the numerical value on the right. This is
shown in Figure 237 below. Use the Increase and Decrease keys to adjust the
damping period to the desired value, and then press the Enter key (
) to move the highlight to the numerical value on the right. This is
shown in Figure 237 below. Use the Increase and Decrease keys to adjust the
damping period to the desired value, and then press the Enter key (![]() ) to accept the value and store it within the WSO100.
) to accept the value and store it within the WSO100.
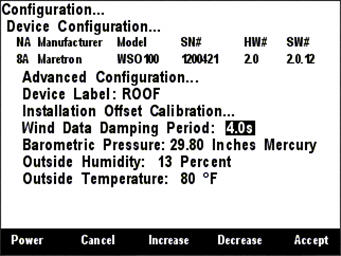
Figure 237 – Setting the Wind Data Damping Period
6.32.5 Barometric Pressure
The WSO100 has an internal barometer, which is pre-calibrated before leaving the factory. If the unit requires re-calibrating, then this field allows the entry of the actual pressure. This may be necessary if the vessel is on a lake with an altitude other than sea level, and the user wishes to normalize the barometric pressure to sea level.
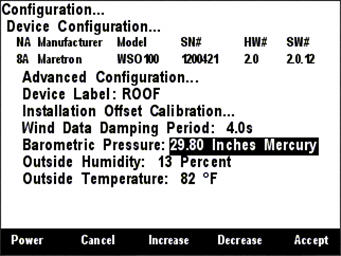
Figure 238 – Setting the Barometric Pressure
Use the Increase and Decrease buttons to select the correct pressure, and the press the Enter button to store it.
6.32.6 Outside Humidity
The Humidity is pre-calibrated before leaving the factory, and should not require adjustment. However the current humidity level may be entered in this screen to re-calibrate the WSO100 should this be required.
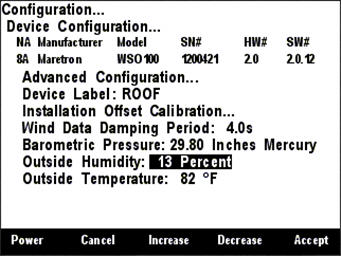
Figure 239 – Setting the Outside Humidity
Use the Increase and Decrease buttons to select the correct humidity, and the press the Enter button to store it.
6.32.7 Outside Temperature
The Temperature sensor is pre-calibrated before leaving the factory, and should not require adjustment. However the current temperature may be entered in this screen to re-calibrate the WSO100 should this be required.
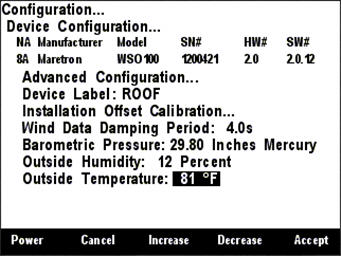
Figure 240 – Setting the Outside Temperature
Use the Increase and Decrease buttons to select the correct temperature, and the press the Enter button to store it.
7 Data Display Types
7.1 Anchor Watch Display
The Anchor Watch Display is a graphical representation of an Anchor Alert. See Section 8.3.7.9 for details on how to set up the Anchor Alert.
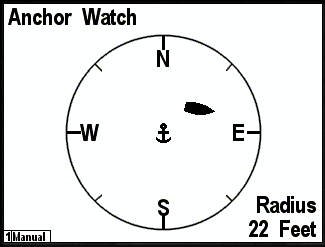
Figure 241 – Anchor Watch Display Example
The display is centered on the position at which the anchor is dropped; this point is represented by the anchor symbol. The control is always oriented North-up, with the boundary circle located at the Alert Set Point distance from the anchor position. The position of the vessel is represented by the boat symbol. This is oriented according to the heading of the boat.
You may use the control mode of the display to easily set the Anchor Drop position as follows. In order to set the Anchor Drop position using the display, create a screen with an Anchor Watch display.
In normal operating mode, use the “Scroll Up” and “Scroll Down” keys to change to the screen containing the Anchor Watch display. Once that screen is displayed, follow these steps to set the Anchor Drop position:
- Press the “Enter” key for approximately one second. This will place the display into “Control mode”, and one of the controllable items on the screen will be highlighted with a thick border.
- If there is more than one controllable item on the screen, you may use the “Scroll Up” and “Scroll Down” keys to change the highlight to the Anchor Watch display.
- Once the Anchor Watch display is selected, then press the “Power” key. You will then see a confirmation popup asking whether it is okay to set the Anchor Drop position to the current position. If you answer “Yes”, then the Anchor Drop position will be set to the current GPS position.
- To exit the control mode, press the “Lights” key to return to normal operating mode. The highlight will disappear.
7.2 Bar Graph
The bar graph display shows a parameter on a vertical bar graph with ten segments. The numeric value of the parameter is shown above the bar graph. A full-screen example of a bar graph display can be seen in Figure 242 below.
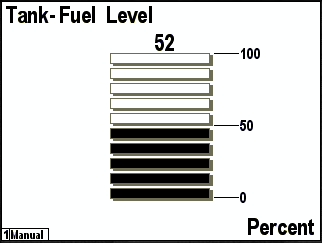
Figure 242 – Bar Graph Display Example
7.3 Compass Rose Display
The compass rose display shows a heading, bearing, or course parameter on a compass rose display. There are two types of compass roses, 1) “Course Up” where the needle is always pointing straight up and the compass rose rotates to indicate the heading pointed to by the needle (Figure 243), and 2) “North Up” where the rose always has North straight up and the needle rotates pointing in the direction of the heading, bearing or course parameter (Figure 244).
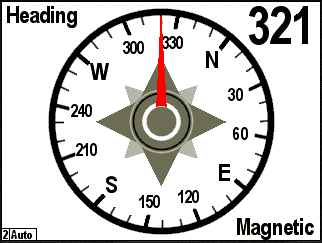
Figure 243 – Compass Rose Display (Course Up) Example
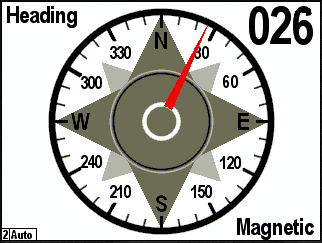
Figure 244 – Compass Rose (North Up) Display
7.4 Date
The date display shows a date. The format of the date shown can be set using the “Units…” menu (please refer to 5.2.7.13 for details on how to set the date format). A full-screen of a date display can be seen in Figure 245 below.
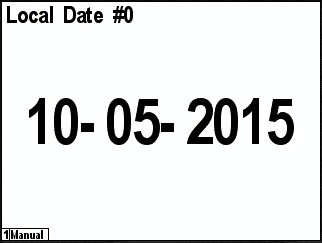
Figure 245 – Date Display Example
7.5 Date/Time
The Date/Time display shows a date and time on a single display. The format of the date shown can be set using the “Units…” menu (please refer to 5.2.7.13 for details on how to set the date format). The format of the time shown can be set using the “Units…” menu (please refer to Section 5.2.7.11 for details on how to set the time format). A full-screen example of a Date/Time display can be seen in Figure 246 below.
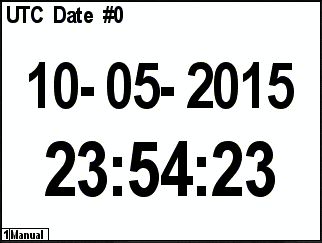
Figure 246 – Date/Time Display Example
7.6 Gauge Display
The gauge display shows the selected data in a graphical format resembling an analog gauge. There is a general gauge format for most types of display, and a specialized rudder gauge display. A full-screen example of a tachometer display can be seen in Figure 247 below.
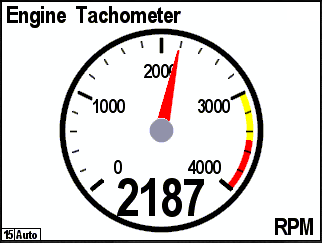
Figure 247 – Gauge Display Example
A full-screen example of the rudder gauge display can be seen in Figure 248 below.
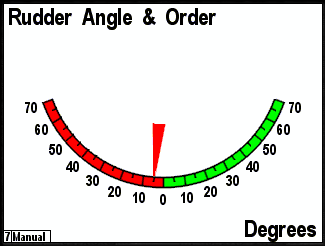
Figure 248 – Rudder Angle Gauge Display Example
7.7 GPS Status Display
The GPS Status display shows the following data about the selected GPS receiver:
· GPS operating mode (2D, 3D, DGPS)
· Satellite signal strength (up to 12 satellites)
· Satellite azimuth and elevation (up to 12 satellites)
· Position
· HDOP
· Time
· Date
· Accuracy of position
An example of a full-screen GPS Status display can be seen below in Figure 249.
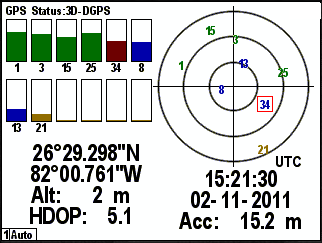
Figure 249 – GPS Status Display Example
7.8 Half Gauge Display
The Half Gauge display shows the selected parameter value in a graphical format resembling a semicircular analog gauge. A full screen example of a half gauge display can be seen in below.
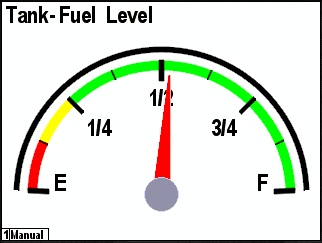
Figure 250 – Half Gauge Display Example
7.9 Indicator Light
The DSM410 is capable of displaying the state of binary (ON/OFF) sensors on the network with an indicator light display that emulates a status light on a control panel.
The display may be set up in several different configurations:
· Single-Indicator Light – this creates a single indicator light
· 2 rows – this creates four rows of single indicator lights
· 3 rows – this creates three rows of single indicator lights
· 4 rows – this creates four rows of single indicator lights
· 2 rows, 2 columns – this creates two rows by two columns of a single indicator light
Figure 271 below shows a Favorite Screens Setup screen with a single window configured with the “4 rows” configuration.
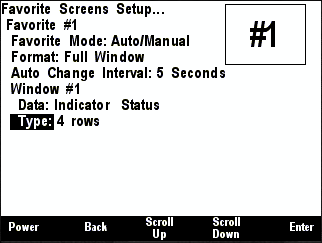
Figure 251 – Configuration of Indicator Light Display
The maximum number of indicator lights you can have on a single screen is 16 (the “4 Quarters” format, with all four windows set to use the “4 rows” or “2 rows, 2 column” indicator light configurations.
In order to configure the individual indicator lights, press the “Enter” key with the selected type highlighted to display a menu with entries for each indicator light in the window being configured, as shown in Figure 272 below.
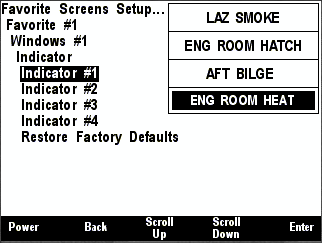
Figure 252 – Selection of an Individual Indicator Light
Figure 273 below shows the configuration menu for each individual indicator light.
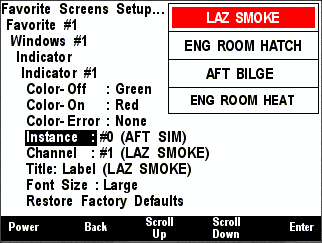
Figure 253 – Configuration of an Individual Indicator Light
Each indicator light has several configurable parameters:
· Color-Off – select the color to be displayed when the indicator is in the OFF state. The default color is gray.
· Color-On – select the color to be displayed when the indicator is in the ON state. The default color is green.
· Color-Error – select the color to be displayed when the indicator is in the ERROR state, which may indicate faulty sensor or connection. The default color is red.
· Instance – the instance number of the switch bank containing the indicator to be monitored.
· Channel – the channel number of the indicator to be monitored.
· Title – Sets the text string to be displayed on the indicator light. Please refer to Section 5.2.6.4.4 for details.
· Font Size – Sets the size of the font used to display the label on the indicator light. You may select Small, Medium, or Large (default).
· Restore Factory Defaults – This restores the indicator light to factory default settings.
7.10 Numeric Display
The numeric display shows the selected parameter in a numeric format on the screen. A full-screen example of the current depth display can be seen below in Figure 254.
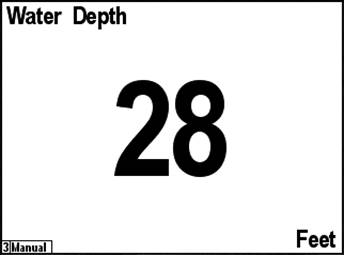
Figure 254 – Numeric Display Example
The upper left hand corner indicates the parameter being displayed and the center of the screen shows the numeric value for the indicated parameter. The bottom right hand corner shows the units.
7.11 Numeric/Precision
The numeric/precision display shows the selected parameter in a numeric format on the screen, but at a higher resolution (or precision) than the numeric display. A full-screen example of the current depth display can be seen below in Figure 254.
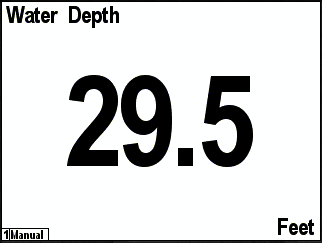
Figure 255 – Numeric/Precision Display Example
The upper left hand corner indicates the parameter being displayed and the center of the screen shows the numeric value for the indicated parameter. The bottom right hand corner shows the units.
7.12 Rolling Road
The DSM410 supports a “Rolling Road”, or navigation highway display. This display repeats transmitted navigation data from a primary navigator, such as a chart plotter or a personal computer running navigation software. Figure 256 below shows the favorites screen setup menu with the rolling road selected. When the rolling road is selected the displayed navigation data, the “Type:” submenu changes to four “Item:” submenus. The rolling road display can show numerical displays of four navigation-related data items in addition to the graphical display of boat position and progress towards the desired waypoint.
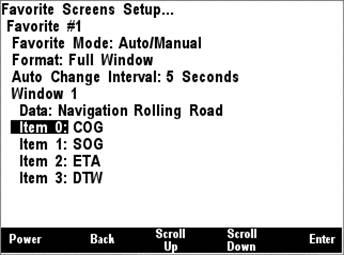
Figure 256 – Configuration of Rolling Road Display
The following data items may be displayed on the rolling road display:
· COG (Course Over Ground)
· SOG (Speed Over Ground)
· BTW (Bearing to Waypoint)
· DTW (Distance to Waypoint)
· VMG (Velocity Made Good)
· ETA (Estimated Time of Arrival)
· TTG (Time to Go)
· XTE (Cross Track Error)
· Set
· Drift
· BOD (Bearing, Origin to Destination)
· HDG (Heading)
Figure 257 below shows a rolling road display. The navigation parameters that have been selected are COG, SOG, ETA, and TTG. On the navigation highway itself, the waypoint name, if available, is displayed on the upper left and the waypoint number, if available, is displayed on the upper right. The dashed vertical line along the center of the highway represents the current leg of the route. The distance of the boat to the left or the right of the line represents the XTE (Cross Track Error). The angle of the boat relative to the vertical line represents the difference between the boat’s COG (Course Over Ground) and the BTW (Bearing to Waypoint). The scale of the XTE display can be selected by setting a value for the XTE alarm (See Section 5.2.1, “Alert Setup Menu”, on page 27 for details).
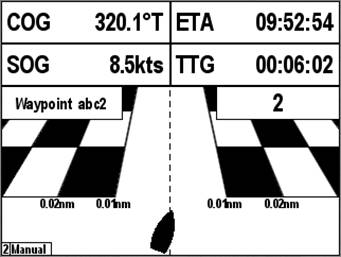
Figure 257 – Rolling Road Display
7.13 Line Graph
The line graph display shows the value of a parameter displayed on the horizontal axis versus time on the vertical axis. Figure 258 below shows the line graph display for barometric pressure over a time period of one day. The line graph display can show the selected data over a time period of 1, 2, 3, 4, 5, 6, or 7 days. Line graph displays are supported only for barometric pressure.
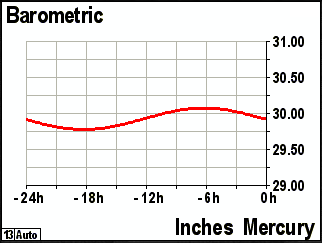
Figure 258 – Line Graph Display
7.14 SMS Status
The SMS Status display shows the status of an SMS100 SMS (Text) Module on the network. It will show whether the SMS100 is connected to the cellular network, and if it is connect, the cellular carrier along with the phone number used by the SMS100. Figure 259 below shows an example of this type of display.
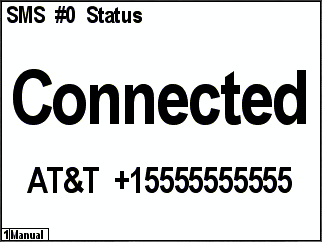
Figure 259 – SMS Status Display
7.15 Time (hh:mm)
The Time (hm:mm) display shows a time value in an hours and minutes format. Figure 260 below shows an example of this type of display.
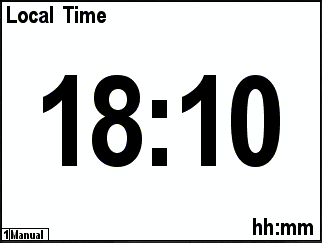
Figure 260 – Time (hh:mm) Display
7.16 Time (hh:mm:ss)
The Time (hm:mm:ss) display shows a time value in an hours, minutes, and seconds format. Figure 261 below shows an example of this type of display.

Figure 261 – Time (hh:mm:ss) Display
7.17 VDR Status
The VDR Status display shows the status of a VDR100 Vessel Data Recorder on the network. The normal state for the VDR is “Recording”. Please refer to the VDR100 User’s Manual for other status that could be displayed on the VDR Status display. Figure 262 below shows an example of this type of display.
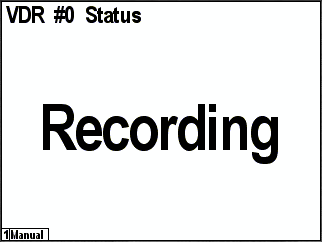
Figure 262 – VDR Status Display
7.18 Weather Display
The DSM410 supports a single-screen weather display that shows a wide variety of weather-related information. A screen shot of the weather display appears in Figure 263 below.

Figure 263 – Weather Display
The weather display shows the following information:
· Wind Direction (Ground Referenced)
· Wind Speed (Ground Referenced)
· Heat Index / Wind Chill
· Outside Temperature
· Outside Humidity
· Barometric Pressure
· Inside Temperature
· Inside Humidity
· Dew Point
· Moon Phase
· Sunrise
· Sunset
7.19 Wind Rose
The DSM410 supports a wind rose display, which displays apparent wind direction and speed measured relative to the moving vessel, or true wind direction and speed measured relative to the moving vessel, depending on the parameter selected. A screen shot of a wind rose appears in Figure 264 below.
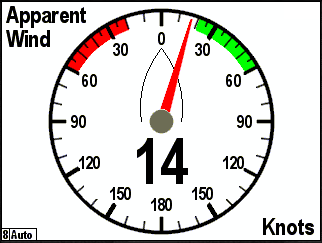
Figure 264 – Wind Rose Display
7.20 Moon Phase Display
The DSM410 supports a moon phase display which shows the current phase of the moon at the current location. An example screenshot of the moon phase display appears in Figure 265 below.
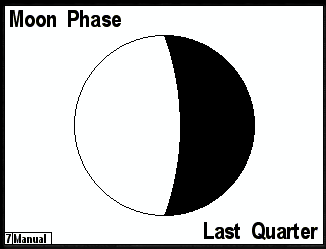
Figure 265 – Moon Phase Display
7.21 SMS Signal Strength Bar
The SMS Signal Strength Bar display shows the signal strength detected by the SMS100 SMS (Text) Module from the connected cellular network. Figure 266 below shows an example of this type of display.
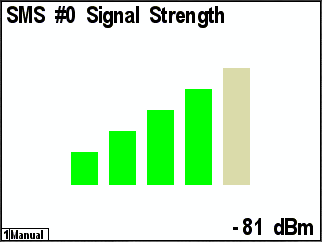
Figure 266 – SMS Signal Strength Bar Display
7.22 Trim Tabs Bar Graph Display
The DSM410 supports a trim tab display in which the relative positions of the port and starboard trim tabs are displayed on a dual bar graph. A screenshot of the trim tab display appears in Figure 267 below.
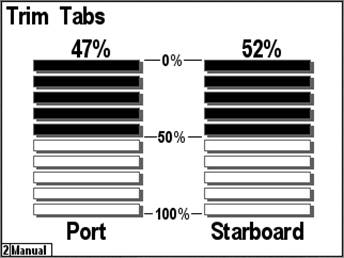
Figure 267 – Trim Tab Display
7.23 Swing Meter Display
The DSM410 supports a swing meter display, similar to those found on dedicated swing meters, for displaying the rate of turn of the vessel in degrees per minute. The swing meter is available in ranges of +/- 30°/minute, +/- 100°/minute, or +/- 300°/minute. A screenshot of the swing meter display appears in Figure 268 below.
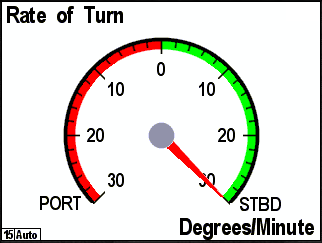
Figure 268 – Swing Meter Display
7.24 Tank Gauge Display
The DSM410 supports a tank level gauge display type which shows percentage of fluid remaining in a tank on an analog gauge with 180° of travel. A screenshot of a tank gauge display showing a fuel tank’s level appears in Figure 269 below.
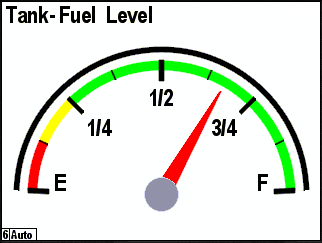
Figure 269 – Tank Gauge Display
7.25 Watermaker Status
The DSM410 supports a watermaker status display type which shows the operating status of a Sea Recovery watermaker connected on the network. A screenshot of a watermaker status display showing a fuel tank’s level appears in Figure 270 below.
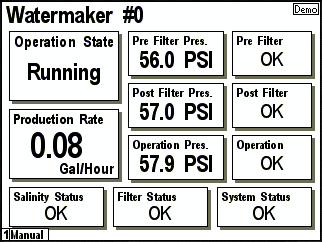
Figure 270 – Watermaker Status Display
7.26 Switch/Breaker Display
The DSM410 is capable of controlling loads controlled by a Maretron DCR100 DC Relay, a Carling OctoPlex AC Box or DC Box, or other NMEA 2000® load controller which uses NMEA Command of the 127501 Binary Switch Bank Status PGN for control.
The display may be set up in several different configurations:
· Single-Indicator Light – this creates a single switch/breaker
· 2 rows – this creates four rows of single switches/breakers
· 3 rows – this creates three rows of single switches/breakers
· 4 rows – this creates four rows of single switches/breakers
· 2 rows, 2 columns – this creates two rows by two columns of a single switch/breaker
Figure 271 below shows a Favorite Screens Setup screen with a single window configured with the “4 rows” configuration.
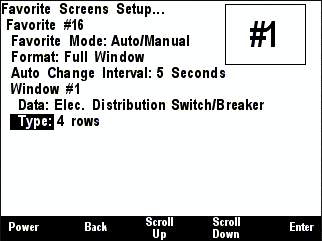
Figure 271 – Configuration of Switch/Breaker Display
The maximum number of switches/breakers you can have on a single screen is 16 (the “4 Quarters” format, with all four windows set to use the “4 rows” or “2 rows, 2 column” switch/breaker configurations.
In order to configure the individual switch/breaker controls, press the “Enter” key with the selected type highlighted to display a menu with entries for each switch/breaker in the window being configured, as shown in Figure 272 below.
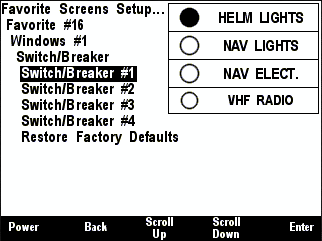
Figure 272 – Selection of an Individual Switch/Breaker
Figure 273 below shows the configuration menu for each individual switch/breaker.
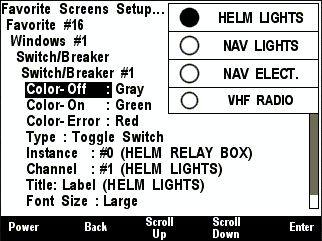
Figure 273 – Configuration of an Individual Switch/Breaker
Each switch/breaker has several configurable parameters:
· Color-Off – select the color to be displayed when the controlled load is in the OFF state. The default color is gray.
· Color-On – select the color to be displayed when the controlled load is in the ON state. The default color is green.
· Color-Error – select the color to be displayed when the controlled load is in the ERROR state, which may indicate a tripped breaker. The default color is red.
· Type – you may choose between the default value of “Toggle”, in which case the switch/breaker changes state every time you press the power button while it is highlighted, or “Momentary”, in which case the switch-breaker is turned on only while you are pressing the power button while it is highlighted.
· Instance – the instance number of the switch bank containing the switch/breaker to be controlled.
· Channel – the channel number of the switch/breaker to be controlled.
· Title – Sets the text string to be displayed on the switch/breaker. Please refer to Section 5.2.6.4.4 for details.
· Font Size – Sets the size of the font used to display the label on the switch/breaker. You may select Small, Medium, or Large (default).
· Restore Factory Defaults – This restores the switch/breaker to factory default settings.
In order to control a switch/breaker using the DSM410, create a screen with a switch/breaker which has been configured to refer to the switch bank instance and indicator number of the switch/breaker you want to control.
In normal operating mode, use the “Scroll Up” and “Scroll Down” keys to change to the screen containing the switch/breaker. Once that screen is displayed, follow these steps to change a load’s state:
1. Press the “Enter” key for approximately one second. This will place the display into “Control mode”, and one of the switches/breakers on the screen will be highlighted with a thick border, as shown in Figure 274 below.
2. If there is more than one switch/breaker on the screen, you may use the “Scroll Up” and “Scroll Down” keys to change the highlight to a different switch/breaker.
3. Once the switch/breaker for the load you want to control is selected, then press the “Power” key. The load referenced by the switch/breaker will be commanded to change state, and the changed state will be reflected in the switch/breaker.
4. To change other loads, repeat the process.
5. To stop controlling loads, press the “Lights” key to return to normal operating mode. The highlight will disappear.
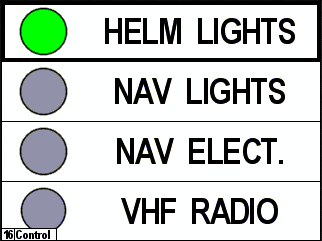
Figure 274 – Favorite Screen Showing Highlighted Switch/Breaker
8 Alerts
The DSM410 can act as both an Alert Source and an Alert Monitor. An Alert Source monitors parameters received on the NMEA2000® bus against a user entered threshold, and displays alerts when parameters go out of range. It will also transmit this Alert information to other Alert Monitors on the bus (Platinum copies of N2KView™ or other DSM410s) and sound the ALM100 annunciators as required. Operators may accept or cancel the Alerts from the buttons on the front of the DSM410.
An Alert Monitor, the DSM410 monitors the bus for Alert messages from Alert Sources, and displays the remote Alert information on the DSM410’s screen. Operators may accept or cancel the remote Alerts from the buttons on the front of the DSM410, in which case an Alert Command Message is sent back to the Alert Source.
8.1 Displaying Active Alerts
Active Alerts are overlaid on all the favorite screens.
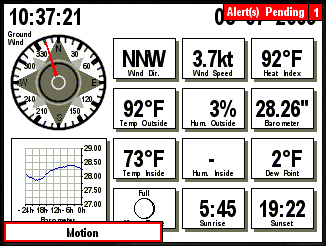
Figure 275 – Alert Display
The number of Alerts with pending operator actions is shown in the top right corner. This will be colored red if the highest pending Alert is an Alarm and yellow if it is a Warning. The description of the active Alert with the highest priority is shown at the bottom left of the screen. This will be colored red if it is an Alarm and yellow if it is a Warning. In addition, the state of the alert (0) will be shown as follows:
Active – The enclosing box will flash between a solid red or yellow and white.
Accepted – The enclosing box will be a solid red or yellow.
Awaiting Cancel – The enclosing box will be outlined in red or yellow, as shown in Figure 275.
8.1.1 Alert Status Screen
The list of Active Alerts is displayed in tabular form on the Alert Status Screen. This Screen may be displayed by selecting the Alert Status option from the Main Menu.
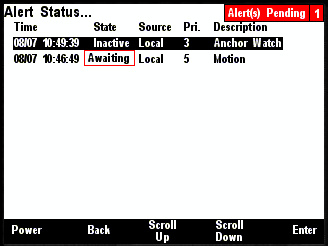
Figure 276 – Alert Status Screen
8.2 Accepting or Cancelling an Alert
Active Alerts may be accepted (4.3.2) by the operator to indicate that the operator has taken responsibility for the Alert. Alerts that have been triggered and the cause removed without being accepted by a user must be cleared.
8.2.1 From a Favorite Screen
The Alert with the highest priority that requires accepting
or cancelling is shown at the bottom left of the screen (see Figure
275). This Alert may easily be accepted or cancelled without changing screens
by pressing the Power button ![]() .
.
8.2.2 From the Alert Status Screen
Figure 277 – Cancelling an Alert from the Alert Status Screen
Use the Scroll Up and Scroll Down buttons to select the Alert to be accepted or cancelled, and then press the Enter button. An Alert Description screen will be displayed with the details of the Alert and the cursor positioned over the Accept/Cancel Alert entry.
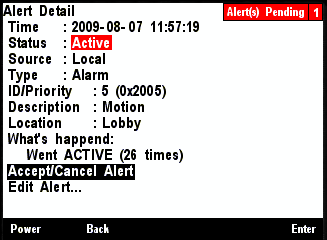
Figure 278 – The Alert Detail Screen
Pressing the Enter button at this point will Accept or Cancel the Alert.
8.3 Adding an Alert
Alerts are created by selecting the parameter to be monitored (e.g. Depth), and then selecting the type of Alert (e.g. High Alert). Start by going to the Add New Alert entry in the Alert Setup Menu.
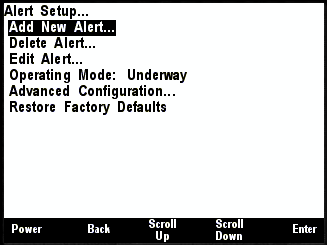
Figure 279 – Adding a New Alert
Pressing Enter brings up the Alert Edit Screen.
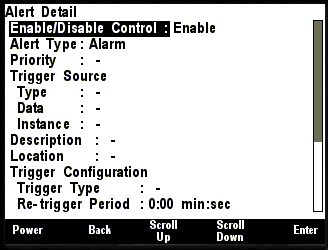
Figure 280 – Part of the Alert Edit Screen
This allows the entry of all the alert parameters, which can vary depending on the type of alert chosen. These parameters are:
8.3.1 Enable/Disable Control
This allows individual alerts to be enabled or disabled. The decision to disable an Alert must be made very carefully, as it nullifies the purpose for having alerts. The options here are:
· Enable
· Disable
The desired option is selected using the Scroll Up and Scroll Down buttons.
8.3.2 Alert Type
This allows the selection of the type of Alert (see paragraph 4.3.1). The options here are:
· Alarm
· Warning
The desired option is selected using the Scroll Up and Scroll Down buttons.
8.3.3 Priority
Each Alarm has a unique priority ranging from 0 (highest priority) to 3999 (lowest priority). Each Warning has a unique priority in the same range; however the entire set of Warning Priorities is considered lower than the Alarm Priorities. No two Alarms / Warnings may have the same priorities, and, when scrolling through the priorities, numbers that are already in use will be omitted from the list.
The desired option is selected using the Scroll Up and Scroll Down buttons.
8.3.4 Trigger Source
This allows the selection of the parameter to be monitored. The parameters are laid out as per Section 4.2. The trigger source is specified in three parts, which when combined will uniquely identify a single parameter on the bus.
8.3.4.1 Type
The Type corresponds to the category of data.
The desired option is selected using the Scroll Up and Scroll Down buttons.
8.3.4.2 Data
The Data corresponds to the Data Type of data.
The desired option is selected using the Scroll Up and Scroll Down buttons.
8.3.4.3 Instance
The Instance corresponds to the instance of the data type on the bus.
The desired option is selected using the Scroll Up and Scroll Down buttons.
8.3.5 Description
This is a textual field that will be displayed on the DSM410 and transmitted to Alert Slave devices. It is intended to describe the alert (e.g. Fire).
8.3.6 Location
This is a textual field that will be displayed on the DSM410 and transmitted to Alert Slave devices. It is intended to describe the location at which the problem was detected (e.g. Main Stateroom).
8.3.7 Trigger Configuration
This set of fields is used to describe the condition under which the alert will be triggered. The sub-fields will vary depending on the Trigger Type, which, in turn, is determined by the Trigger Source.
8.3.7.1 Trigger Type is High Alert
A high alert is used to signal you when a parameter value rises above a threshold you determine. For example, you can set an alert to occur whenever the freezer temperature rises above 0°C.
8.3.7.1.1 Description
A high alert and associated diagram are shown in the figure below.
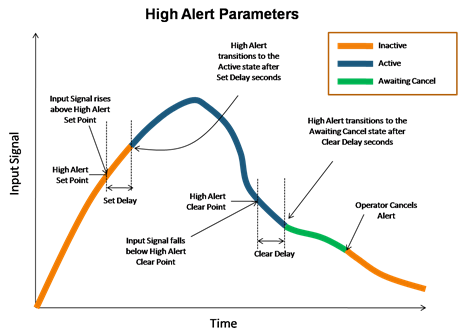
Figure 281 – High Alert Parameters
A high alert is triggered (i.e. becomes an active alert) once an input signal has risen above the High Alert Set Point and the Set Delay time has elapsed. If the Set Delay is set to zero, then the alert is immediately triggered once the input signal rises above the High Alert Set Point. The Set Delay is used to reduce false or spurious alerts. As an example, setting the Set Delay to 5 seconds will eliminate any temporary transitions of the input signal above the High Alert Set Point lasting less than 5 seconds from triggering an alert. Once the alert is triggered, it becomes an active alert. An alert remains active until
· The input signals falls below the High Alert Clear Point and the Clear Delay time has elapsed. If the Clear Delay is set to zero, then the alert immediately transitions to the Awaiting Cancel once the input signal falls below the High Alert Clear Point (as shown in the example above).
· The user accepts the alert in which case it transitions into the Accepted state.
The Clear Delay is used to reduce false or spurious alerts.
8.3.7.1.2 Trigger Configuration
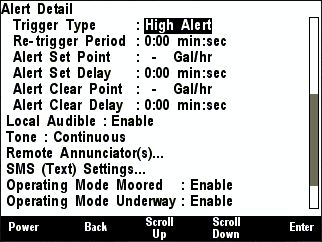
Figure 282 – Trigger Configuration – High Alert
Re-trigger Period – When you accept an alert, it will change to the “Accepted” state, and annunciators that are sounding for that alert will stop sounding. If the condition which caused the alert remains true after the amount of time in this field, the alert will return to the “Active” state, and annunciators will begin sounding again for that alert. The value is entered as minutes:seconds. If only one number is entered, it will be interpreted as seconds. If a value of 0:00 is entered, then the alert will never re-trigger.
Alert Set Point – If the value of the parameter being monitored rises above the value in this field, the alert will become active.
Alert Set Delay – The parameter being monitored must rise above the Alert Set Point value for longer than the time in this field in order for an alert to become active. This can be used to prevent false alerts caused by parameter values that briefly have a value that would cause an alert but quickly return to the normal value range. The value is entered as minutes:seconds. If only one number is entered, it will be interpreted as seconds.
Alert Clear Point – If the alert is active and the parameter value falls below the value in this field, the alert will become inactive.
Alert Clear Delay – The parameter being monitored must fall below the Alert Clear Point value for longer than the time in this field in order for the alert to become inactive. The value is entered as minutes:seconds. If only one number is entered, it will be interpreted as seconds.
8.3.7.2 Trigger Type is Low Alert
A low alert is used to signal you when a parameter value falls below a threshold you determine. For example, you can set an alert to occur whenever the port engine oil pressure rises falls below 40 PSI.
8.3.7.2.1 Parameters
A low alert and associated diagram are shown in the figure below.
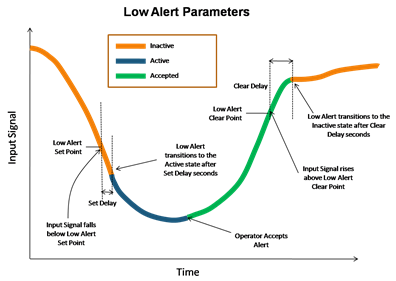
Figure 283 – Low Alert Parameters
A low alert is triggered (i.e. becomes an active alert) once an input signal has dropped below the Low Alert Set Point and the Set Delay time has elapsed. If the Set Delay is set to zero, then the alert is immediately triggered once the input signal drops below the Low Alert Set Point. The Set Delay is used to reduce false or spurious alerts. As an example, setting the Set Delay to 5 seconds will eliminate any temporary transitions of the input signal above the Low Alert Set Point lasting less than 5 seconds from triggering an alert. Once the alert is triggered, it becomes an active alert. An alert remains active until:
· The input signals rises above the Low Alert Clear Point and the Clear Delay time has elapsed. If the Clear Delay is set to zero, then the alert immediately becomes inactive once the input signal falls below the Low Alert Clear Point. The Clear Delay is used to reduce false or spurious alerts.
· The user accepts the alert (as shown in the example above).
8.3.7.2.2 Trigger Configuration
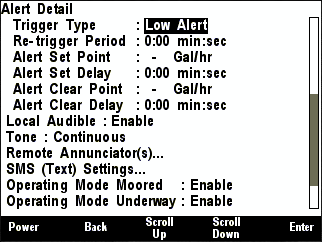
Figure 284 – Trigger Configuration – Low Alert
Re-trigger Period – When you accept an alert, it will change to the “Accepted” state, and annunciators that are sounding for that alert will stop sounding. If the condition which caused the alert remains true after the amount of time in this field, the alert will return to the “Active” state, and annunciators will begin sounding again for that alert. If a value of 0:00 is entered, then the alert will never re-trigger.
Alert Set Point – If the value of the parameter being monitored falls below the value in this field, the alert will become active.
Alert Set Delay – The parameter being monitored must fall below the Low Alert Set Point value for longer than the time in this field in order for an alert to become active. This can be used to prevent false alerts caused by parameter values that briefly have a value that would cause an alert but quickly return to the normal value range. The value is entered as minutes:seconds. If only one number is entered, it will be interpreted as seconds.
Alert Clear Point – If the alert is active and the parameter value rises above the value in this field, the alert will become inactive.
Alert Clear Delay – The parameter being monitored must rise above the Low Alert Clear Point value for longer than the time in this field in order for the alert to become inactive. The value is entered as minutes:seconds. If only one number is entered, it will be interpreted as seconds.
In this example, the set point may be described in more than one unit, so additional fields have been supplied so that the user can select the units of depth. Changing the units of the set point will also change the units of the clear point. The initial units displayed in these fields will correspond to those set in the Units Dialog (see Section 5.2.7).
8.3.7.3 Trigger Type is Data Unavailable Alert
The Data Unavailable Alert can be used in conjunction with other alert types when you need to know if a particular parameter is no longer being received on the network or is flagged as “not available” by the transmitting device. For instance, you probably would want to use a Data Unavailable Alert for the Depth->Current Depth parameter, since it would be advisable to know if the depth sounder were to stop transmitting a depth reading or became unable to determine the depth due to fouling or some other reason. On the other hand, if you were to set a Data Unavailable Alert on Engine->Engine Water Temperature parameter, you would then get an alert every time the ignition was switched off and the engine’s ECU stopped transmitting data.
8.3.7.3.1 Trigger Configuration
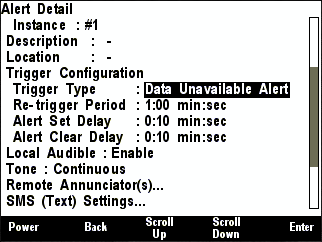
Figure 285 – Trigger Configuration – Data Unavailable Alert
Re-trigger Period – When you accept an alert, it will change to the “Accepted” state, and annunciators that are sounding for that alert will stop sounding. If the condition which caused the alert remains true after the amount of time in this field, the alert will return to the “Active” state, and annunciators will begin sounding again for that alert. If a value of 0:00 is entered, then the alert will never re-trigger.
Alert Set Delay – If a valid value for the parameter being monitored is continually not received or has an invalid value for the amount of time specified in this field, the alert will become active.
Alert Clear Delay – The parameter being monitored must continually be received with a valid value for longer than the time in this field in order for the alert to become inactive.
8.3.7.4 Trigger Type is On Alert
As opposed to high and low alerts that are associated with analog input signals (i.e., many different possible input values), there are also switch alerts that are associated with a binary input value (sometimes called on or off, yes or no, enabled or disabled, set or reset, active or inactive). The switch alert is similar to the high and low alert except that there are no set or reset points. The mere fact that the switch is seen as On causes the alert to become an active alert (assuming the Set Delay is set to zero). Likewise, if the switch being monitored is seen as false (i.e., binary 0), then the alert becomes inactive (assuming the Clear Delay is set to zero). If the delays are not programmed to zero, then the switch must remain On for the Set Delay before the alert becomes active, and must remain Off for the Clear Delay before the alert becomes inactive.
8.3.7.4.1 Trigger Configuration
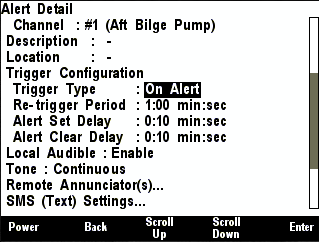
Figure 286 – Trigger Configuration – On Alert
Re-trigger Period – When you accept an alert, it will change to the “Accepted” state, and annunciators that are sounding for that alert will stop sounding. If the condition which caused the alert remains true after the amount of time in this field, the alert will return to the “Active” state, and annunciators will begin sounding again for that alert. If a value of 0:00 is entered, then the alert will never re-trigger.
Alert Set Delay – The condition for the parameter being monitored must be in its error condition for at least the set delay time before the alert will become active. An interesting use of the set delay when monitoring a bilge pump (for example) is to set the Set Delay to a large value (say 20 minutes). Now, if the bilge pump runs for more than 20 minutes at a time the alert will be triggered.
Alert Clear Delay – The condition for the parameter being monitored must be not in its error condition for at least the clear delay time before the alert will become cleared.
8.3.7.5 Trigger Type is Off Alert
As opposed to high and low alerts that are associated with analog input signals (i.e., many different possible input values), there are also switch alerts that are associated with a binary input value (sometimes called on or off, yes or no, enabled or disabled, set or reset, active or inactive). The switch alert is similar to the high and low alert except that there are no set or reset points. The mere fact that the switch is seen as Off causes the alert to become an active alert (assuming the Set Delay is set to zero). Likewise, if the switch being monitored is seen as On, then the alert becomes inactive (assuming the Clear Delay is set to zero). If the delays are not programmed to zero, then the switch must remain Off for the Set Delay before the alert becomes active, and must remain On for the Clear Delay before the alert becomes inactive.
8.3.7.5.1 Trigger Configuration
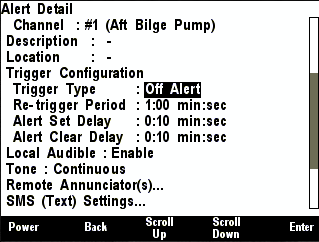
Figure 287 – Trigger Configuration – Off Alert
Re-trigger Period – When you accept an alert, it will change to the “Accepted” state, and annunciators that are sounding for that alert will stop sounding. If the condition which caused the alert remains true after the amount of time in this field, the alert will return to the “Active” state, and annunciators will begin sounding again for that alert. If a value of 0:00 is entered, then the alert will never re-trigger.
Alert Set Delay – If the switch being monitored is in the Off state for the amount of time specified in this field, the alert will become active.
Alert Clear Delay – If the switch being monitored is in a state other than “Off” for the amount of time specified in this field, the alert will become inactive.
8.3.7.6 Trigger Type is Error Alert
When monitoring circuit breakers, the error alert can be used to raise an alert when the circuit breaker trips due to over current. As with the On and Off alerts, the Set Delay and Clear Delay values are used to prevent spurious triggering.
8.3.7.6.1 Trigger Configuration
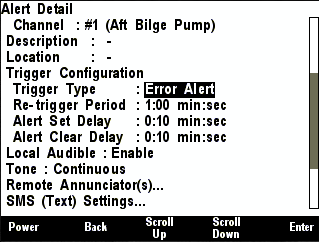
Figure 288 – Trigger Configuration Editor – Tripped Alert
Re-trigger Period – When you accept an alert, it will change to the “Accepted” state, and annunciators that are sounding for that alert will stop sounding. If the condition which caused the alert remains true after the amount of time in this field, the alert will return to the “Active” state, and annunciators will begin sounding again for that alert. If a value of 0:00 is entered, then the alert will never re-trigger.
Alert Set Delay – If the switch being monitored is in the Tripped state for the amount of time specified in this field, the alert will become active.
Alert Clear Delay – If the switch being monitored is in a state other than “Tripped” for the amount of time specified in this field, the alert will become inactive.
8.3.7.7 Trigger Type is Outside Radius Alert
The Outside Radius Alert is used to signal an alert whenever the vessel moves outside a programmable distance in any direction away from a reference point (expressed as a longitude and latitude). This alert is useful when the vessel is anchored or moored and the vessel should not drift outside a perimeter and if it does, an alert is activated. The point of reference can be selected from the current position or it can be manually entered. Figure 289 shows an Outside Radius Alert and associated parameters. The Outside Radius Alert and the Anchor Alert are very similar. The radius of the Outside Radius Alert is specified in either Nautical Miles or Kilometers, while the radius of the Anchor Alert is specified in Feet or Meters.
8.3.7.7.1 Parameters
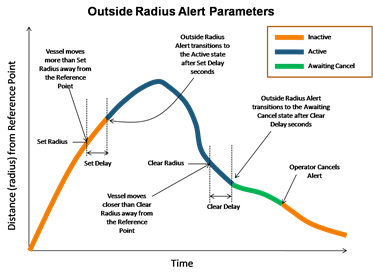
Figure 289 – Outside Alert Parameters
8.3.7.7.2 Trigger Configuration – Outside Radius Alert
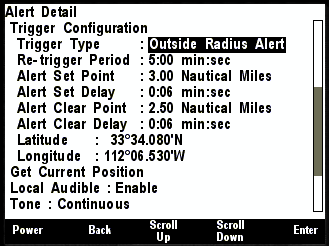
Figure 290 – Trigger Configuration – Outside Radius Alert
Re-trigger Period – When you accept an alert, it will change to the “Accepted” state, and annunciators that are sounding for that alert will stop sounding. If the condition which caused the alert remains true after the amount of time in this field, the alert will return to the “Active” state, and annunciators will begin sounding again for that alert. If a value of 0:00 is entered, then the alert will never re-trigger.
Alert Set Point – If the distance between the current GPS position and the reference position rises above the value in this field, the alert will become active.
Alert Set Delay – The distance between the current GPS position and the reference position must rise above the Outside Radius Alert Set value for longer than the time in this field in order for an alert to become active.
Alert Clear Point – If the alert is active and the distance between the current GPS position and the reference position falls below the value in this field, the alert will become inactive.
Alert Clear Delay – The distance between the current GPS position and the reference position must fall below the Outside Radius Alert Clear value for longer than the time in this field in order for an alert to become inactive.
Latitude – The latitude of the reference position. This may be typed in as <degrees>:<minutes> followed by an N or S. If the N or S is missing, North is assumed. Moving the cursor to another field will reformat the contents of this field.
Longitude – The longitude of the reference position. This may be typed in as <degrees>:<minutes> followed by an E or W. If the E or W is missing, East is assumed. Moving the cursor to another field will reformat the contents of this field.
Get Current Position – Selecting this will transfer the current GPS position into the Latitude and Longitude fields.
8.3.7.8 Trigger Type is Inside Radius Alert
The Inside Radius Alert is similar to the Outside Radius Alert except that an alert is activated if the vessel comes within a certain distance or radius of a reference point (expressed as a longitude and latitude). Figure 291 shows an Inside Radius Alert and associated parameters.
8.3.7.8.1 Trigger Configuration
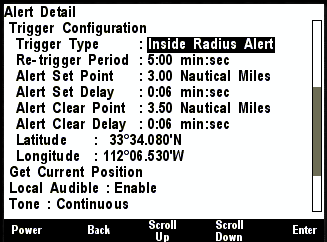
Figure 291 – Trigger Configuration – Inside Radius Alert
Re-trigger Period – When you accept an alert, it will change to the “Accepted” state, and annunciators that are sounding for that alert will stop sounding. If the condition which caused the alert remains true after the amount of time in this field, the alert will return to the “Active” state, and annunciators will begin sounding again for that alert.
Alert Set Point – If the distance between the current GPS position and the reference position falls below above the value in this field, the alert will become active.
Alert Set Delay – The distance between the current GPS position and the reference position must fall below the Inside Radius Alert Set value for longer than the time in this field in order for an alert to become active.
Alert Clear Point – If the alert is active and the distance between the current GPS position and the reference position rises above the value in this field, the alert will become inactive.
Alert Clear Delay – The distance between the current GPS position and the reference position must rise above the Inside Radius Alert Clear value for longer than the time in this field in order for an alert to become inactive.
Latitude – The latitude of the reference position. This may be typed in as <degrees>:<minutes> followed by an N or S. If the N or S is missing, North is assumed. Moving the cursor to another field will reformat the contents of this field.
Longitude – The longitude of the reference position. This may be typed in as <degrees>:<minutes> followed by an E or W. If the E or W is missing, East is assumed. Moving the cursor to another field will reformat the contents of this field.
Get Current Position – Selecting this line will transfer the current GPS position into the Latitude and Longitude fields.
8.3.7.9 Trigger Type is Anchor Alert
The Anchor Alert is a special case of the Outside Radius Alert (Section 8.3.7.7). It is used to signal an alert whenever the vessel moves outside a programmable distance in any direction away from a reference point (expressed as a longitude and latitude). This alert is useful when the vessel is anchored or moored and the vessel should not drift outside a perimeter and if it does, an alert is activated. The point of reference can be selected from the current position or it can be manually entered.
The Outside Radius Alert and the Anchor Alert are very similar. The Anchor Alert is designed to allow the input of relatively small radius values, and may be displayed graphically through the Anchor Watch Display (Section 7.1). The radius of the Outside Radius Alert is specified in either Nautical Miles or Kilometers, while the radius of the Anchor Alert is specified in Feet or Meters.
See Section 8.3.7.7 for details of the configuration of the Anchor Alert.
8.3.7.10 Trigger Type is GPS Quality Alert
The accuracy, or quality, of a position fix provided by a GPS is dependent on the number of satellites used to compute the position. A position based on less than three satellites is considered a “1D” lock, three satellites is a “2D” lock, more than three satellites is a “3D” lock, and more than three satellites with SBAS is a “3D-DGPS” lock. These different locks are indicative of the quality or accuracy of the given position with 1D having the lowest quality and 3D-DGPS providing the highest quality. The GPS Quality Alert is used to alert you if the quality of the position falls below a specified quality level.
8.3.7.10.1 Trigger Configuration – GPS Quality Alert
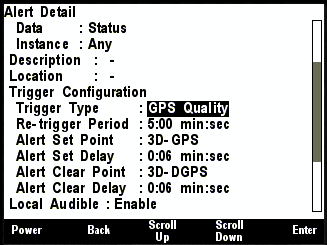
Figure 292 – Trigger Configuration – GPS Quality Alert
Re-trigger Period – When you accept an alert, it will change to the “Accepted” state, and annunciators that are sounding for that alert will stop sounding. If the condition which caused the alert remains true after the amount of time in this field, the alert will return to the “Active” state, and annunciators will begin sounding again for that alert. If a value of 0:00 is entered, then the alert will never re-trigger.
Alert Set Point – The Alert will be triggered when the qaulity of the GPS fix, as reported by the GPS drops lower than the value specified in this field.
Possible Values are:
· 3D-DGPS (best quality)
· 3D-GPS
· 2D-GPS
· 1D-GPS
· No fix
Alert Set Delay – When the quality of the GPS fix becomes lower than the quality specified in the Alert Set Point field for longer than the time specified in the Alert Set Delay field, the alert will become active.
Alert Clear Point – The Alert will be cleared when the quality of the GPS fix, as reported by the GPS becomes better than the value specified in this field.
Possible values are the same as the Alert Set Point.
Alert Clear Delay – If the alert is active and the quality of the GPS fix becomes higher than the quality specified in the Alert Clear Point field for longer than the time specified in the Clear Delay field, the alert will become inactive.
8.3.7.11 Trigger Type is Direction Alert
A Direction Alert is used to indicate that a heading or wind direction has changed from the reference direction more than a programmable amount. For example, once a heading has been established, an alert can be generated if the heading changes more than a specified amount. Direction Alerts may also be set for wind direction. The reference direction can be selected from the current direction (heading or wind direction) or it can be manually entered. Figure 293 shows a Direction Alert and associated parameters.
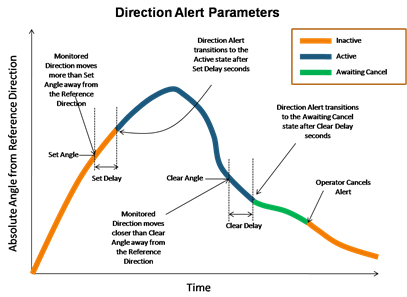
Figure 293 – Direction Alert Parameters
8.3.7.11.1 Trigger Configuration – Direction Alert
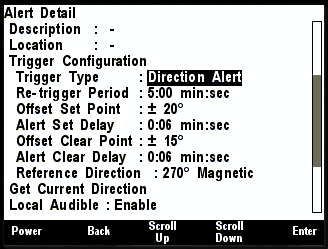
Figure 294 – Trigger Configuration – Direction Alert
Re-trigger Period – When you accept an alert, it will change to the “Accepted” state, and annunciators that are sounding for that alert will stop sounding. If the condition which caused the alert remains true after the amount of time in this field, the alert will return to the “Active” state, and annunciators will begin sounding again for that alert. If a value of 0:00 is entered, then the alert will never re-trigger.
Offset Set Point, Offset Set Delay – If the direction being monitored differs from the reference direction by more than the Offset Heading Set Point for longer than the time specified in the Set Delay field, the alert will become active.
Offset Clear Point, Offset Clear Delay – If the alert is active and the direction being monitored differs from the reference direction by less than the Offset Heading Clear Point for longer than the time specified in the Clear Delay field, the alert will become inactive.
Reference Heading / Reference Direction / Reference Course – Enter the desired reference heading or direction into this field. If the monitored value differs from this value by more than the Offset Heading Set Point, the alert will be triggered.
Get Current Heading / Get Current Direction / Get Current Course – Pressing or clicking on this button will transfer the current value of the heading or direction being monitored into the Reference Heading / Reference Direction Field.
8.3.7.12 Trigger Type is Time Alert
The DSM410 can be configured with alerts that go active at a predetermined time, such as an alarm clock. These alerts can also be configured to become active periodically, making them useful for signaling watch changes (for example, every four hours) or as a personnel alarm (making sure a crew member is at the helm every 15 minutes).
When a Time Alert with a Repeat Interval of zero is accepted, it will be disabled to prevent further triggering. When a Time Alert with a Repeat Interval greater than zero is accepted, it will transition to the Inactive state, waiting for the next time it should trigger.
8.3.7.12.1 Trigger Configuration – Time Alert
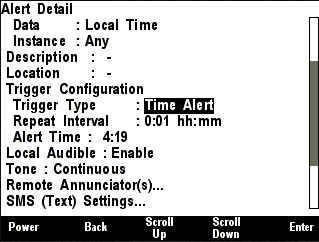
Figure 295 – Alert Editor – Time Alert
Alert Time – The alert will become active at the time specified in this field. If the time specified has already passed, then the alarm will be set for the next day. Entering a number without the colon will assume that the hours are zero.
Repeat Interval – The alert will become active again after the period specified in this field. For example, if the Alarm Time were set to 8:00 and the Repeat Interval were set to 1:00 (1 hour, zero minutes), the Alarm would become active again at 9:00, 10:00, and so on.
8.3.8 Local Audible
If the Local Audible field is set to Enabled, the speaker internal to the DSM410 will be activated when this Alert is triggered.
8.3.9 Tone
If Local Audible is enabled, the tone that is sounded on the DSM410 and the Remote Annunciators can be set here. This allows the user to configure the Alerts so that the alert can be identified from the tone. The values for Tone are:
Beeps – A continuous series of half second on, half second off beeps is sounded. This corresponds to the requirements for IMO Code 3.a
Continuous – A continuous tone is sounded. This corresponds to the requirements for IMO Code 2
General Emergency – A series of seven one second on, one second off tones are sounded, followed by a single tone of 7 seconds on. The sequence is repeated. This corresponds to the requirements for IMO Code 1a (7 pulse) (General Emergency Alarm, SOLAS III/50, III/6.4)
Carbon Monoxide – This is a series of four one tenth second on, one tenth second off beeps followed by one and a half seconds of silence. The sequence is repeated. This corresponds to the requirements for Temporal 4 alarms *(T4, CO)
Fire – This is a series of three half a second on, half a second off beeps followed by one and a half seconds of silence. The sequence is repeated. This corresponds to the requirements for Code-3 (ISO 8201, Smoke/Fire)
8.3.10 Remote Annunciators
Selecting the Remote Annunciators option will bring up a list of 16 ALM100 devices. If the Annunciator is active on the NMEA2000® bus, and the Annunciator has been given a label, the label will be displayed, in parenthesis, alongside the instance number.
Note: the DSM410 is limited to working with annunciators with data instance numbers in the range 0-15.
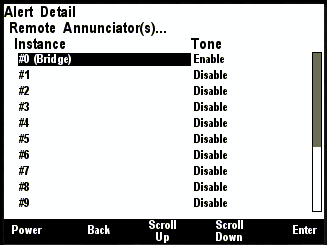
Figure 296 – Remote Annunciator Enable/Disable
To enable a specific Annunciator, use the Scroll Up and Scroll Down buttons to position the cursor, and then press the Enter button to move to the Tone column.
The options here are
· Enable
· Disable
The desired option is selected using the Scroll Up and Scroll Down buttons, and then pressing the Enter button again. The tone of the Annunciator will be the same as that set in 8.3.9.
8.3.11 SMS (Text) Settings…
For each alert, you may select up to three phone numbers from the phone book to send an alert message to. For each phone number, you may choose to send a message when the alert is triggered, when the alert is cleared, or both when the alert is triggered and when the alert is cleared. After you select this entry and press “Enter” the screen changes to show the “SMS (Text) Settings…” screen as shown in Figure 297 below.
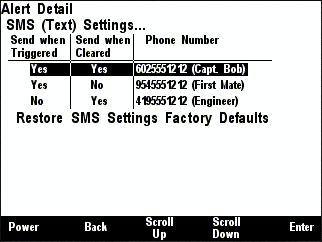
Figure 297 – SMS (Text) Settings... Screen
Use the “Scroll Up” and “Scroll Down” keys to highlight the desired entry, and press “Enter” to edit it. The screen will change to the “SMS (Text) Phone Number #x” screens shown in Figure 298 below.
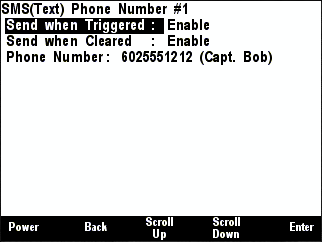
Figure 298 – SMS (Text) Phone Number #x Screen
This contains the following fields:
· Send When Triggered – an “Enable” value in this field will cause a SMS text message to be sent to the number in the “Phone Number” field whenever the alert is triggered. A “Disable” value will cause the display to not send a text message to this number in this case.
· Send When Cleared – an “Enable” value in this field will cause a SMS text message to be sent to the number in the “Phone Number” field whenever the alert is cleared. A “Disable” value will cause the display to not send a text message to this number in this case.
· Phone Number – use this field to select one of the phone number entries from the phone book.
8.3.12 Operating Mode Moored
See Section 4.3.4 for a description of Operating Modes. For this Alert to be triggered when the vessel is in the Moored state, this option must be set to Enabled.
The options here are
· Enable
· Disable
The desired option is selected using the Scroll Up and Scroll Down buttons, and then pressing the Enter button again.
8.3.13 Operating Mode Underway
See Section 4.3.4 for a description of Operating Modes. For this Alert to be triggered when the vessel is in the Underway state, this option must be set to Enabled. The options here are
· Enable
· Disable
The desired option is selected using the Scroll Up and Scroll Down buttons, and then pressing the Enter button again.
8.3.14 Operating Mode Anchored
See Section 4.3.4 for a description of Operating Modes. For this Alert to be triggered when the vessel is in the Anchored state, this option must be set to Enabled. The options here are
· Enable
· Disable
The desired option is selected using the Scroll Up and Scroll Down buttons, and then pressing the Enter button again.
8.3.15 Scope
Alerts may be constrained to be displayed only on the DSM410 where they are detected. In this case the Alert message is not sent out on the NMEA2000 bus, and other devices will not display the alert, or allow Accepting of Cancelling. The Scope does not affect the generation of Annunciator messages.
The options here are
· Local – the Alert messages are not transmitted
· Global – the Alert messages are transmitted
The desired option is selected using the Scroll Up and Scroll Down buttons, and then pressing the Enter button again.
8.4 Deleting an Alert
From the Alert Setup Menu, select the menu item Delete Alert… .
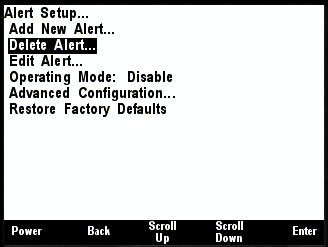
Figure 299 – Deleting an Alert
This brings up the list of Alerts managed by the DSM410.
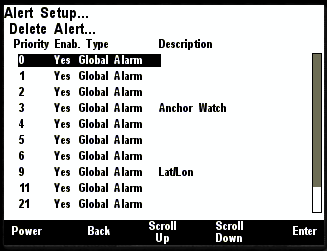
Figure 300 – Deleting Alert List
Scroll up and down using the Scroll Up and Scroll Down buttons until the alert that must be deleted is highlighted, and press the Enter button.
A confirmation message is displayed.
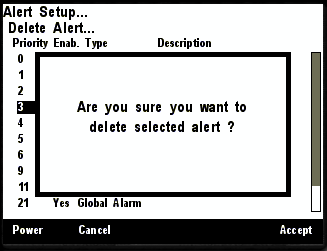
Figure 301 – Deleting an Alert: Confirmation
Press the Accept button to delete the Alert or the Cancel button to return to the previous screen without deleting the Alert.
8.5 Editing an Alert
From the Alert Setup Menu, select the menu item Edit Alert… .
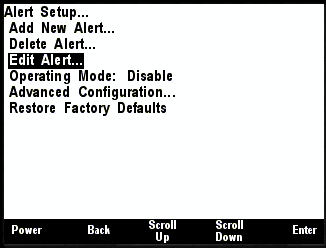
Figure 302 – Editing an Alert
This brings up the list of Alerts managed by the DSM410.
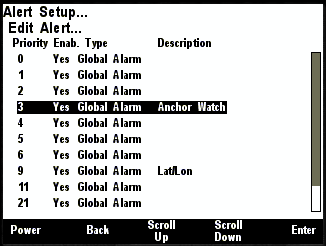
Figure 303 – Editing an Alert: Alert List
The following information is shown for each alert that is in the system.
Priority – The priority of the Alert (see 8.3.3).
Enab. – Whether the Alert is Enabled or Disabled.
Type – The Type of Alert. This is a combination of whether the Alert is Local or Global (8.3.15) and whether the Alert is an Alarm or a Warning (4.3.1)
Description – The textual description of the Alert (8.3.5)
Scroll up and down using the Scroll Up and Scroll Down buttons until the alert that must be edited is highlighted, and press the Enter button.
The Alert Editor is opened, pre-populated with the parameters of the chosen Alert. See Section 8.1 for details of these parameters.
8.6 Setting the Vessel Operating Mode
The Vessel Operating Mode must be set on each DSM410. This is a potentially risky operation, in that Alerts that are Active in the existing mode may be ignored in the new Operating Mode. The DSM410 will warn the operator about these Alerts to minimize the risk. However, if the new vessel status was transmitted to other Alert Sources that are unmanned, then the warnings would be lost. For this reason, the Vessel Operating mode must be changed at each DSM410 or N2Kview, and those alerts, which would be disabled, noted by the user.
The Vessel Operating Mode is set through the Alert Setup Screen. Scroll Down to the required Operating Mode entry, press Enter and then use the Scroll Up / Scroll Down buttons to select the new Mode. Press Enter to complete the operation.
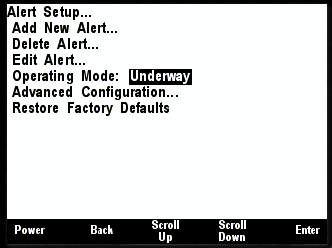
Figure 304 – Setting the Vessel Operating Mode
The options here are
· Disable
· Moored
· Anchored
· Underway
|
NOTE
The DSM410 will always display global alerts generated by other devices on the network, regardless of the Operating Mode selected. |

8.7 SMS (Text) Phone Book
The display is able to transmit SMS (text) messages via a Maretron SMS100 SMS (Text) Module in the event of an alert. This menu allows you to program up to eight different phone numbers to which the display will send alert messages. Each alert can send a message to up to three of the numbers in the phone book. To edit the SMS (Text) Phone Book, scroll to the “SMS (Text) Phone Book…” entry on the “Alert Setup…” menu as shown in Figure 305.
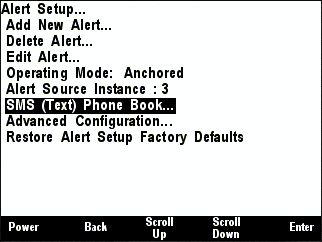
Figure 305 – Editing the SMS (Text) Phone Book
Once you have pressed “Enter”, the screen will change to display the SMS (Text) Phone Book, as shown in the figure below:
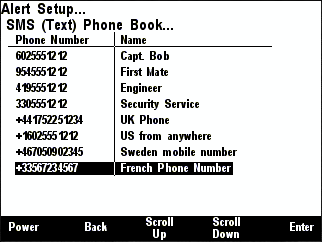
Figure 306 – SMS (Text) Phone Book Screen
To edit a number in the phone book, press Scroll Up and Scroll Down until the desired entry is highlighted, and then press Enter. A popup window will enable you to edit the phone number for the entry as shown in the figure below:
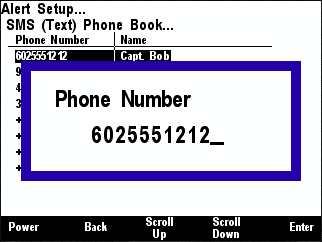
Figure 307 – Phone Number Editing
See Section 3.3.4 for details on editing the phone number. Starting the phone number with the international “+” prefix will allow the number to work regardless of what country the phone’s SIM card phone number is registered in.
After you have edited the phone number and saved it by pressing Enter a second time after the last digit is entered, you will then be given the chance to edit the name for the phone number as shown in Figure 308 below. The purpose of this name is simply to make it easy to remember who the phone number is for.
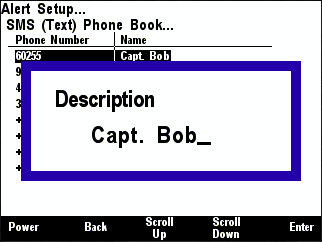
Figure 308 – Editing the Name of a Phone Book Entry
See Section 3.3.4 for details on editing the phone book entry name. After you have entered the name, you will be given the opportunity to send a test message, as shown in Figure 309 below.
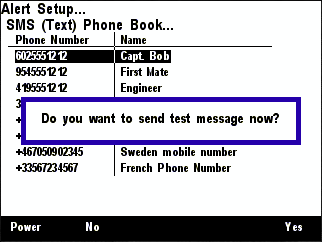
Figure 309 – SMS Phone Book Test Message Popup
Press “Yes” to send a test message, or press “No” to skip sending the test message. You will be returned to the “SMS (Text) Phone Book…” screen.
Once you have created all of the phone book entries you need, press the “Back” key to exit the “SMS (Text) Phone Book…” screen.
8.8 Advanced Configuration
The Advanced Parameters of the Alert System may be configured through this Screen. Enter the screen though the Alert Setup menu, and select the Advanced Configuration option.

Figure 310 – Advanced Configuration
The following parameters may be set.
8.8.1 Remote Alert Audible
If Remote Alerts are enabled, and an active alert is received from another device on the bus, the DSM410 will respond by adding the Alert to its list of Active Alerts (Section 8.1), and sounding the internal speaker. The sounding of the speaker may be disabled (i.e. only visual indications are displayed) by setting this parameter to Disable. The options here are
· Enable
· Disable
8.8.2 Flashing Screen
As an extra means to gain the operator’s attention to an Active Alert, the DSM410 may be set up to flash the entire screen between Red (for Alarms) or Yellow (for Warnings) and Black. The flashing may be disabled by setting this option to Disable. The options here are
· Enable
· Disable
8.9 Restore Factory Defaults
The Alert parameters of the DSM410 may be restored to the factory defaults by pressing the
Enter button while this item is highlighted. The operator will be prompted to confirm this action before it taken.
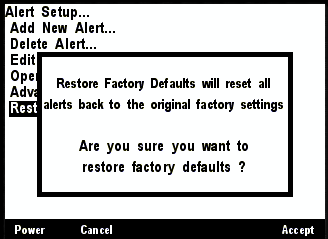
Figure 311 – Restore Factory Defaults Confirmation
9 Maintenance
Regular maintenance is important to ensure continued proper operation of the Maretron DSM410. Perform the following tasks periodically:
· Clean the unit with a soft cloth. Do not use chemical cleaners as they may remove paint or markings or may corrode the DSM410 enclosure or seals. Do not use any cleaners containing acetone, as they will deteriorate the plastic enclosure.
· Ensure that the unit is mounted securely and cannot be moved relative to the mounting surface. If the unit is loose, tighten the mounting screws.
· Check the security of the cable connected to the NMEA 2000® interface and tighten if necessary.
10 Troubleshooting
If you notice unexpected operation of the Maretron DSM410, follow the troubleshooting procedures in this section to remedy simple problems.
|
Symptom |
Troubleshooting Procedure |
|
No activity on the display |
Check the connection to the NMEA 2000® and connector and tighten if necessary Ensure that power is supplied to the connected NMEA 2000® cable |
|
Expected data appears as a dash “-“ instead of a value |
Use the N2KAnalyzer tool to verify whether the device providing the data to the network is in transmitting a valid data value. |
|
Data fluctuates between two different values |
Two devices on the network are transmitting the same data. Check the Instance Numbers on all devices transmitting that data. |
If these steps do not solve your problem, please contact Maretron Technical Support (refer to Section 12 for contact information).
Warning: There are no user-serviceable components inside the Maretron DSM410. Opening the DSM410 will expose the sensitive electronic components to adverse environmental conditions that may render the unit inoperative. Please do not open the DSM410, as this will automatically void the warranty. If service is required, please return the unit to an authorized Maretron service location.
11 Technical Specifications
|
Parameter |
Value |
Comment |
|
NMEA 2000® Connector |
DeviceNet Micro-C |
|
|
Display Technology |
Active Matrix TFT LCD |
Sunlight Readable |
|
Display Resolution |
320 x 240 Pixels |
QVGA Resolution |
|
Display Viewable Area |
82.56mm W x 61.92mm H |
4.1” Diagonal |
|
Display Backlighting |
LED |
3 User-Programmed Levels 0-100% |
|
Body Construction |
Anodized Aluminum |
|
|
Keyboard |
5 Capacitive Touch Keys |
LED Backlighting |
|
Languages Supported |
English, Dutch (Nederlands) |
User Selectable |
Certifications
|
Parameter |
Comment |
|
NMEA 2000® |
|
|
Maritime Navigation and Radiocommunication Equipment & Systems |
IEC 61162-3 |
|
Maritime Navigation and Radiocommunication Equipment & Systems |
IEC 60945 |
|
FCC and CE Mark |
Electromagnetic Compatibility |
Supported Display Data Types
|
Description |
Data Types |
|
AC Power |
Average Frequency, Average L-N Voltage, Average L-L Voltage, Phase A Frequency, Phase A L-N Voltage, Phase AB L-L Voltage, Phase B Frequency, Phase B L-N Voltage, Phase BC L-L Voltage, Phase C Frequency, Phase C L-N Voltage, Phase CA L-L Voltage, |
|
Anchor |
Watch |
|
DC |
Current, Voltage, Battery Temperature, Battery State of Charge, Battery Time Remaining, Ripple Voltage, Power |
|
Depth |
Water Depth, Water Below Transducer, Transducer Offset |
|
Electrical |
Resistance |
|
Elec. Distribution |
Switch/Breaker, Breaker Current, Hardware OFF Counter, Hardware ON Counter, Hardware ERROR Counter, Hardware ON Timer, Hardware OFF Timer, Hardware ERROR Timer |
|
Engine Monitor |
Boost Pressure, Hours, Coolant Pressure, Coolant Temp., Exhaust Gas Temp., Fuel Pressure, Fuel Rate, Oil Pressure, Oil Temp., Tachometer, Tilt/Trim, Voltage, Fuel Economy, Fuel Consumption, Percent Load, Percent Torque, Trip Fuel Used, Warning Indicators |
|
Environment |
Barometer, Heat Index, Humidity Inside, Humidity Outside, Moon Phase, Sunrise, Sunset, Dew Point, Temp. Engine Room, Temp. Inside, Temp. Main Cabin, Temp. Outside, Temp. Sea, Twilight AM, Twilight PM, Weather, Wind Chill |
|
Fluid Flow |
Flow Rate, Trip Volume |
|
Fuel Management |
Distance to Empty, Time to Empty, Total Fuel Capacity, Total Fuel Level, Total Fuel Consumption, Total Trip Fuel Used, Total Fuel Economy, Total Fuel Rate, Total Fuel Remaining |
|
GPS |
COG, Lat/Lon, SOG, DOP, Satellites, Time, Accuracy |
|
Heading |
Heading, Rate of Turn, Variation |
|
Humidity |
Inside, Outside, User Defined |
|
Indicator |
Status, Hardware OFF Counter, Hardware ON Counter, Hardware ERROR Counter, Hardware ON Timer, Hardware OFF Timer, Hardware ERROR Timer |
|
Mechanical |
dB, Force, Strain |
|
Motion |
Acceleration, Angle, Angular Velocity, Angular Acceleration, Distance, Rotational Rate, Velocity |
|
Navigation |
BOD, BTW, COG, XTE, DTW, ETA, Lat/Lon, Rolling Road, Set/Drift, SOG, TTG, VMG, Waypoint Number & Name |
|
Pressure/Vacuum |
Altimeter, Barometric, Compressed Air, Engine Boost, Engine Coolant, Engine Fuel, Engine Oil, Hydraulic Oil, Steam, Transmission Oil, User Defined, Water, |
|
Rudder |
Angle & Order |
|
SMS |
Status, Signal Strength, Indicator |
|
Speed |
Through Water, Over Ground, Total Log, Trip Log |
|
Tanks |
Capacity, Level, Remaining |
|
Temperature |
Bait Well, Battery, Engine Coolant, Engine Oil, Engine Room, Exhaust Gas, Freezer, Heat Index, Heating System, Inside, Live Well, Main Cabin, Outside, Refrigeration, Sea, Transmission Oil, User Defined, Wind Chill |
|
Time |
Local Date, UTC Date, Moon Phase, Sunrise, Sunset, Local Time, UTC Time, Twilight AM, Twilight PM |
|
Transmission |
Gear, Oil Pressure, Oil Temperature, Warning Indicators |
|
Vessel |
Heave, Pitch, Roll, Trim Tabs, Keel |
|
Watermaker |
Sea Recovery Status Display |
|
Wind |
Apparent Direction and Speed, True Direction and Speed, Ground Direction and Speed |
NMEA 2000® Parameter Group Numbers (PGNs)
|
Description |
PGN # |
PGN Name |
Default Rate |
|
Response to Requested PGNs |
126464 |
PGN List (Transmit and Receive) |
N/A |
|
126996 |
Product Information |
N/A |
|
|
126998 |
Configuration Information |
N/A |
|
|
Protocol PGNs Received PGNs |
059392 |
ISO Acknowledge |
N/A |
|
059904 |
ISO Request |
N/A |
|
|
060160 |
ISO Transport Protocol, Data Transfer |
N/A |
|
|
060416 |
ISO Transport Protocol, Connection Management |
N/A |
|
|
060928 |
ISO Address Claim |
N/A |
|
|
065240 |
ISO Address Command |
N/A |
|
|
126208 |
NMEA Request/Command/Acknowledge |
N/A |
|
|
65001 |
Bus #1 Phase C Basic AC Quantities |
N/A |
|
|
65002 |
Bus #1 Phase B Basic AC Quantities |
N/A |
|
|
65003 |
Bus #1 Phase A Basic AC Quantities |
N/A |
|
|
65004 |
Bus #1 Average Basic AC Quantities |
N/A |
|
|
65005 |
Util. Total AC Energy |
N/A |
|
|
65006 |
Util. Phase C AC Reactive Power |
N/A |
|
|
65007 |
Util. Phase C AC Power |
N/A |
|
|
65008 |
Util. Phase C AC Basic Quantities |
N/A |
|
|
65009 |
Util. Phase B AC Reactive Power |
N/A |
|
|
65010 |
Util. Phase B AC Power |
N/A |
|
|
65011 |
Util. Phase B AC Basic Quantities |
N/A |
|
|
65012 |
Util. Phase A AC Reactive Power |
N/A |
|
|
65013 |
Util. Phase A AC Power |
N/A |
|
|
65014 |
Util. Phase A AC Basic Quantities |
N/A |
|
|
65015 |
Util. Total AC Reactive Power |
N/A |
|
|
65016 |
Util. Total AC Power |
N/A |
|
|
65017 |
Util. Avg. Basic AC Quantities |
N/A |
|
|
65018 |
Gen. Total AC Energy |
N/A |
|
|
65019 |
Gen. Phase C AC Reactive Power |
N/A |
|
|
65020 |
Gen. Phase C AC Power |
N/A |
|
|
65021 |
Gen. Phase C AC Basic Quantities |
N/A |
|
|
65022 |
Gen. Phase B AC Reactive Power |
N/A |
|
|
65023 |
Gen. Phase B AC Power |
N/A |
|
|
65024 |
Gen. Phase B AC Basic Quantities |
N/A |
|
|
65025 |
Gen. Phase A AC Reactive Power |
N/A |
|
|
65026 |
Gen. Phase A AC Power |
N/A |
|
|
65027 |
Gen. Phase A AC Basic Quantities |
N/A |
|
|
65028 |
Gen. Total AC Reactive Power |
N/A |
|
|
65029 |
Gen. Total AC Power |
N/A |
|
|
065030 |
Generator Average Basic AC Quantities |
N/A |
|
|
065282 |
Number of Channels (Maretron) |
N/A |
|
|
065284 |
DC Breaker Current (Maretron) |
N/A |
|
|
065286 |
Fluid Flow Rate (Maretron) |
N/A |
|
|
065287 |
Trip Volume (Maretron) |
N/A |
|
|
126992 |
System Time |
N/A |
|
|
127245 |
Rudder |
N/A |
|
|
127250 |
Vessel Heading |
N/A |
|
|
127251 |
Rate of Turn |
N/A |
|
|
127252 |
Heave |
N/A |
|
|
127257 |
Attitude |
N/A |
|
|
127258 |
Magnetic Variation |
N/A |
|
|
127488 |
Engine Parameters, Rapid Update |
N/A |
|
|
127489 |
Engine Parameters, Dynamic |
N/A |
|
|
127493 |
Transmission Parameters, Dynamic |
N/A |
|
|
127497 |
Trip Fuel Consumption, Engine |
N/A |
|
|
127498 |
Engine Parameters, Static |
N/A |
|
|
127501 |
Binary Switch Bank Status |
N/A |
|
|
127503 |
AC Input Status |
N/A |
|
|
127504 |
AC Output Status |
N/A |
|
|
127505 |
Fluid Level |
N/A |
|
|
127506 |
DC Detailed Status |
N/A |
|
|
127508 |
Battery Status |
N/A |
|
|
127513 |
Battery Configuration Status |
N/A |
|
|
127751 |
DC Voltage/Current |
N/A |
|
|
128259 |
Speed, Water Referenced |
N/A |
|
|
128267 |
Water Depth |
N/A |
|
|
128275 |
Distance Log |
N/A |
|
|
129025 |
Position, Rapid Update |
N/A |
|
|
129026 |
COG & SOG, Rapid Update |
N/A |
|
|
129029 |
GNSS Position Data |
N/A |
|
|
129033 |
Local Time Offset |
N/A |
|
|
129283 |
Cross Track Error |
N/A |
|
|
129284 |
Navigation Data |
N/A |
|
|
129285 |
Navigation – Route/WP Information |
N/A |
|
|
129291 |
Set & Drift, Rapid Update |
N/A |
|
|
129302 |
Bearing and Distance Between Two Marks |
N/A |
|
|
129538 |
GNSS Control Status |
N/A |
|
|
129539 |
GNSS DOPs |
N/A |
|
|
129540 |
GNSS Sats In View |
N/A |
|
|
130306 |
Wind Data |
N/A |
|
|
130310 |
Environmental Parameters |
N/A |
|
|
130311 |
Environmental Parameters |
N/A |
|
|
130312 |
Temperature |
N/A |
|
|
130313 |
Humidity |
N/A |
|
|
130314 |
Actual Pressure |
N/A |
|
|
130316 |
Temperature, Extended Range |
N/A |
|
|
130576 |
Trim Tab Status |
N/A |
|
|
130816 |
Watermaker Status (Sea Recovery) |
N/A |
|
|
130817 |
Annunciator Capabilities (Maretron) |
N/A |
|
|
130818 |
Label (Maretron) |
N/A |
|
|
130819 |
Alert Transmission (Maretron) |
N/A |
|
|
130820 |
Alert Response (Maretron) |
N/A |
|
|
130821 |
Alert Text (Maretron) |
N/A |
|
|
130822 |
Alert Control (Maretron) |
N/A |
|
|
130823 |
Temperature, High Range (Maretron) |
N/A |
|
|
130824 |
Annunciator (Maretron) |
N/A |
|
|
130825 |
Data Instance/Chan Correlation (Maretron) |
N/A |
|
|
130826 |
Switch Indicator Status (Maretron) |
N/A |
|
|
130828 |
Dometic HVAC Status (Maretron) |
N/A |
|
|
130829 |
Dometic Icemaker Status (Maretron) |
N/A |
|
|
130833 |
Vessel Data Recorder Status (Maretron) |
N/A |
|
|
130834 |
SMS Status (Maretron) |
N/A |
|
|
130835 |
SMS Text Message (Maretron) |
N/A |
|
|
130836 |
Switch Status Counter (Maretron) |
N/A |
|
|
130837 |
Switch Status Timer (Maretron) |
N/A |
|
|
130840 |
Generic Sensor (Maretron) |
N/A |
Electrical
|
Parameter |
Value |
Comment |
|
Operating Voltage |
9 to 30 Volts |
DC Voltage |
|
Power Consumption (Maximum) |
250mA |
|
|
Load Equivalence Number (LEN) |
5 |
NMEA 2000® Spec. (1LEN = 50 mA) |
|
Reverse Battery Protection |
Yes |
Indefinitely |
|
Load Dump Protection |
Yes |
Energy Rated per SAE J1113 |
Mechanical
|
Parameter |
Value |
Comment |
|
Size |
4.49” (H) x 4.49” (W) x 0.37” (Forward D) x 0.81” (Rear D) 114mm (H) x 114mm (W) x 9.5mm (Forward D) x 20.5mm (Rear D) |
|
|
Weight |
12.2 oz. (346 g) |
|
|
Mounting |
Flush Mount |
|
Environmental
|
Parameter |
Value |
|
IEC 60945 Classification |
Exposed |
|
Degree of Protection |
IP67 |
|
Operating Temperature |
-20°C to 70°C |
|
Storage Temperature |
-30°C to 80°C |
|
Relative Humidity |
93%RH @40°C per IEC60945-8.2 |
|
Vibration |
2-13.2Hz @ ±1mm, 13.2-100Hz @ 7m/s2 per IEC 60945-8.7 |
|
Rain and Spray |
12.5mm Nozzle @ 100liters/min from 3m for 30min per IEC 60945-8.8 |
|
Solar Radiation |
Ultraviolet B, A, Visible, and Infrared per IEC 60945-8.10 |
|
Corrosion (Salt Mist) |
4 times 7 days @ 40°C, 95%RH after 2 hour Salt Spray Per IEC 60945-8.12 |
|
Electromagnetic Emission |
Conducted and Radiated Emission per IEC 60945-9 |
|
Electromagnetic Immunity |
Conducted, Radiated, Supply, and ESD per IEC 60945-10 |
|
Safety Precautions |
Dangerous Voltage, Electromagnetic Radio Frequency per IEC 60945-12 |
12 Technical Support
If you require technical support for Maretron products, you can reach us in any of the following ways:
Fax: 1-602-861-1777
E-mail: [email protected]
World Wide Web: http://www.maretron.com
Mail: Maretron, LLP
Attn: Technical Support
9014 N. 23rd Ave
Suite 10
Phoenix, AZ 85021 USA
13 Installation Template
Please check the dimensions before using the following diagram as a template for drilling the mounting holes because the printing process may have distorted the template.
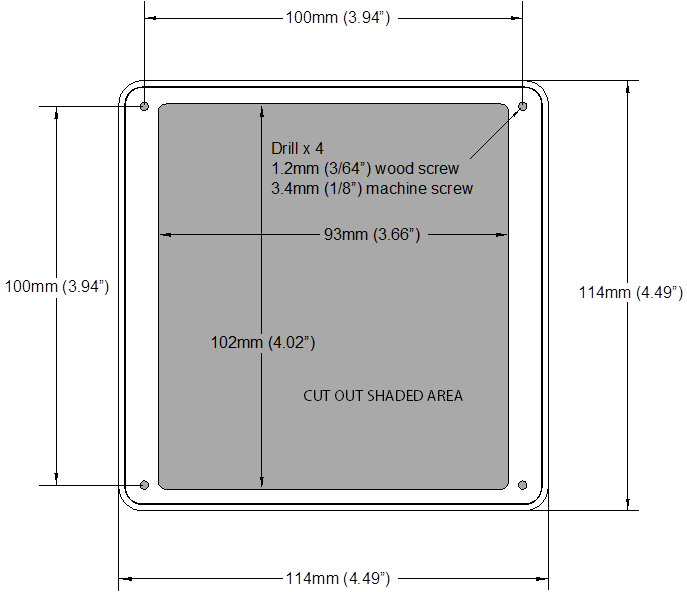
Figure 312 – Flush Mounting Template
14 Maretron (2 Year) Limited Warranty
Maretron warrants the DSM410 to be free from defects in materials and workmanship for two (2) years from the date of original purchase. If within the applicable period any such products shall be proved to Maretron’s satisfaction to fail to meet the above limited warranty, such products shall be repaired or replaced at Maretron’s option. Purchaser's exclusive remedy and Maretron’s sole obligation hereunder, provided product is returned pursuant to the return requirements below, shall be limited to the repair or replacement, at Maretron’s option, of any product not meeting the above limited warranty and which is returned to Maretron; or if Maretron is unable to deliver a replacement that is free from defects in materials or workmanship, Purchaser’s payment for such product will be refunded. Maretron assumes no liability whatsoever for expenses of removing any defective product or part or for installing the repaired product or part or a replacement therefore or for any loss or damage to equipment in connection with which Maretron’s products or parts shall be used. With respect to products not manufactured by Maretron, Maretron’s warranty obligation shall in all respects conform to and be limited to the warranty actually extended to Maretron by its supplier. The foregoing warranties shall not apply with respect to products subjected to negligence, misuse, misapplication, accident, damages by circumstances beyond Maretron’s control, to improper installation, operation, maintenance, or storage, or to other than normal use or service.
THE FOREGOING WARRANTIES ARE EXPRESSLY IN LIEU OF AND EXCLUDES ALL OTHER EXPRESS OR IMPLIED WARRANTIES, INCLUDING BUT NOT LIMITED TO THE IMPLIED WARRANTIES OF MERCHANTABILITY AND OF FITNESS FOR A PARTICULAR PURPOSE.
Statements made by any person, including representatives of Maretron, which are inconsistent or in conflict with the terms of this Limited Warranty, shall not be binding upon Maretron unless reduced to writing and approved by an officer of Maretron.
IN NO CASE WILL MARETRON BE LIABLE FOR INCIDENTAL OR CONSEQUENTIAL DAMAGES, DAMAGES FOR LOSS OF USE, LOSS OF ANTICIPATED PROFITS OR SAVINGS, OR ANY OTHER LOSS INCURRED BECAUSE OF INTERRUPTION OF SERVICE. IN NO EVENT SHALL MARETRON’S AGGREGATE LIABILITY EXCEED THE PURCHASE PRICE OF THE PRODUCT(S) INVOLVED. MARETRON SHALL NOT BE SUBJECT TO ANY OTHER OBLIGATIONS OR LIABILITIES, WHETHER ARISING OUT OF BREACH OF CONTRACT OR WARRANTY, TORT (INCLUDING NEGLIGENCE), OR OTHER THEORIES OF LAW WITH RESPECT TO PRODUCTS SOLD OR SERVICES RENDERED BY MARETRON, OR ANY UNDERTAKINGS, ACTS OR OMISSIONS RELATING THERETO.
Maretron does not warrant that the functions contained in any software programs or products will meet purchaser’s requirements or that the operation of the software programs or products will be uninterrupted or error free. Purchaser assumes responsibility for the selection of the software programs or products to achieve the intended results, and for the installation, use and results obtained from said programs or products. No specifications, samples, descriptions, or illustrations provided Maretron to Purchaser, whether directly, in trade literature, brochures or other documentation shall be construed as warranties of any kind, and any failure to conform with such specifications, samples, descriptions, or illustrations shall not constitute any breach of Maretron’s limited warranty.
Warranty Return Procedure:
To apply for warranty claims, contact Maretron or one of its dealers to describe the problem and determine the appropriate course of action. If a return is necessary, place the product in its original packaging together with proof of purchase and send to an Authorized Maretron Service Location. You are responsible for all shipping and insurance charges. Maretron will return the replaced or repaired product with all shipping and handling prepaid except for requests requiring expedited shipping (i.e. overnight shipments). Failure to follow this warranty return procedure could result in the product’s warranty becoming null and void.
Maretron reserves the right to modify or replace, at its sole discretion, without prior notification, the warranty listed above. To obtain a copy of the then current warranty policy, please go to the following web page: